
Issue with the urdf_tutorial package and Rviz visualization (Problem may be related with the controller_manager).
I am following the Learning URDF Step by Step tutorial which has the following step
- Building a Visual Robot Model with URDF from Scratch
- Building a Movable Robot Model with URDF
- Adding Physical and Collision Properties to a URDF
- Using Xacro to Clean Up a URDF File
- Using a URDF in Gazebo
and is based in the urdf_tutorial package.
Well, I was able to follow, understand and make it work as it should be until the step four (Using Xacro to Clean Up a URDF File). But I the fifth step (Using a URDF in Gazebo) although I understood the concepts from the documentation I was no able to make it work as it should in ROS + Rviz + Gazebo. Here goes self-explanatory picture
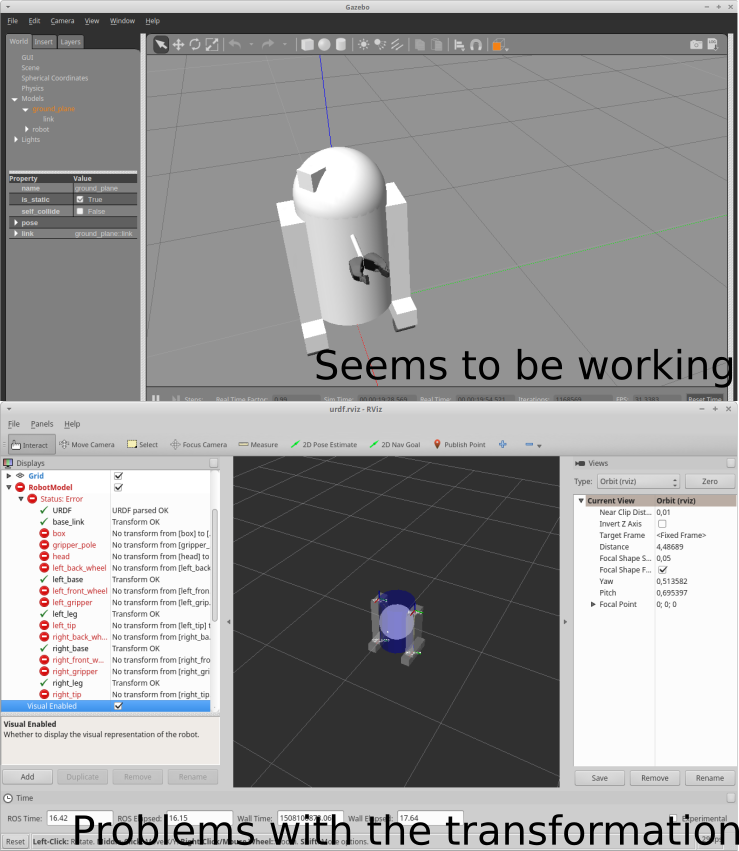
As one can see, the robot visualization in Rviz is broken. This situation was created with the command
roslaunch urdf_sim_tutorial 13-diffdrive.launch
that uses the urdf_tutorial package obtained from this git. The ros output is:
SpawnModel script started
[INFO] [1508101464.915792, 0.000000]: Loading model XML from ros parameter
[INFO] [1508101464.923230, 0.000000]: Waiting for service /gazebo/spawn_urdf_model
[INFO] [1508101465.533706, 0.087000]: Calling service /gazebo/spawn_urdf_model
[INFO] [1508101465.920027, 0.254000]: Spawn status: SpawnModel: Successfully spawned entity
... logging to /home/nut/.ros/log/6ae2963a-b1ec-11e7-8a4c-e02a82110940/roslaunch-renascer-32008.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
]2;/home/nut/catkin_ws/src/urdf_tutorial/urdf_sim_tutorial/launch/13-diffdrive.launch
[1mstarted roslaunch server http://renascer:40983/[0m
SUMMARY
========
PARAMETERS
* /r2d2_diff_drive_controller/angular/z/has_acceleration_limits: True
* /r2d2_diff_drive_controller/angular/z/has_velocity_limits: True
* /r2d2_diff_drive_controller/angular/z/max_acceleration: 6.0
* /r2d2_diff_drive_controller/angular/z/max_velocity: 2.0
* /r2d2_diff_drive_controller/base_frame_id: base_link
* /r2d2_diff_drive_controller/left_wheel: ['left_front_whee...
* /r2d2_diff_drive_controller/linear/x/has_acceleration_limits: True
* /r2d2_diff_drive_controller/linear/x/has_velocity_limits: True
* /r2d2_diff_drive_controller/linear/x/max_acceleration: 0.6
* /r2d2_diff_drive_controller/linear/x/max_velocity: 0.2
* /r2d2_diff_drive_controller/pose_covariance_diagonal: [0.001, 0.001, 0....
* /r2d2_diff_drive_controller/publish_rate: 50
* /r2d2_diff_drive_controller/right_wheel: ['right_front_whe...
* /r2d2_diff_drive_controller/twist_covariance_diagonal: [0.001, 0.001, 0....
* /r2d2_diff_drive_controller/type: diff_drive_contro...
* /r2d2_diff_drive_controller/wheel_separation: 0.44
* /r2d2_gripper_controller/joints: ['gripper_extensi...
* /r2d2_gripper_controller/type: position_controll...
* /r2d2_head_controller/joint: head_swivel
* /r2d2_head_controller/type: position_controll...
* /r2d2_joint_state_controller/publish_rate: 50
* /r2d2_joint_state_controller/type: joint_state_contr...
* /robot_description: <?xml version="1....
* /robot_state_publisher/publish_frequency: 30.0
* /rosdistro: kinetic
* /rosversion: 1.12.7
* /rqt_robot_steering/default_topic: /r2d2_diff_drive_...
* /use_sim_time: True
NODES
/
gazebo (gazebo_ros/gzserver)
gazebo_gui (gazebo_ros/gzclient)
r2d2_controller_spawner (controller_manager/spawner)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
rqt_robot_steering (rqt_robot_steering/rqt_robot_steering)
rviz (rviz/rviz)
urdf_spawner (gazebo_ros/spawn_model)
auto-starting new master
[1mprocess[master]: started with pid [32022][0m
[1mROS_MASTER_URI=http://localhost:11311[0m
]2;/home/nut/catkin_ws/src/urdf_tutorial/urdf_sim_tutorial/launch/13-diffdrive.launch http://localhost:11311
[1msetting /run_id to 6ae2963a-b1ec-11e7-8a4c-e02a82110940[0m
[1mprocess[rosout-1]: started with pid [32035][0m
started core service [/rosout]
[1mprocess[gazebo-2]: started with pid [32059][0m
[1mprocess[gazebo_gui-3]: started with pid [32064][0m
[1mprocess[urdf_spawner-4]: started with pid [32069][0m
[1mprocess[robot_state_publisher-5]: started with pid [32070][0m
[1mprocess[rviz-6]: started with pid [32071][0m
[1mprocess[r2d2_controller_spawner-7]: started with pid [32072][0m
[1mprocess[rqt_robot_steering-8]: started with pid [32073][0m
[1m[urdf_spawner-4] process has finished cleanly
log file: /home/nut/.ros/log/6ae2963a-b1ec-11e7-8a4c-e02a82110940/urdf_spawner-4*.log[0m
[rviz-6] killing ...add a comment
