
How to set camera to give not transparent output
Hello,
I am using a camera in my drone, in the gazebo environment. My .world file contains below code for it:
<sensor name='bottom_camera_sensor' type='camera'>
<update_rate>60</update_rate>
<camera name='head'>
<horizontal_fov>1.41372</horizontal_fov>
<image>
<width>640</width>
<height>360</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.01</near>
<far>100</far>
</clip>
</camera>
<plugin name='bottom_camera_controller' filename='libgazebo_ros_camera.so'>
<cameraName>/ardrone/bottom</cameraName>
<alwaysOn>true</alwaysOn>
<updateRate>60</updateRate>
<imageTopicName>/ardrone/bottom/image_raw</imageTopicName>
<cameraInfoTopicName>/ardrone/bottom/camera_info</cameraInfoTopicName>
<frameName>ardrone_base_bottomcam</frameName>
<robotNamespace>/</robotNamespace>
</plugin>
<pose frame=''>0.15 0 0 3.14159 1.57079 3.14159</pose>
</sensor>
Unfortunately, the camera gives transparent output, i.e. I can see a can of beer through a table and a box, as in the image below:
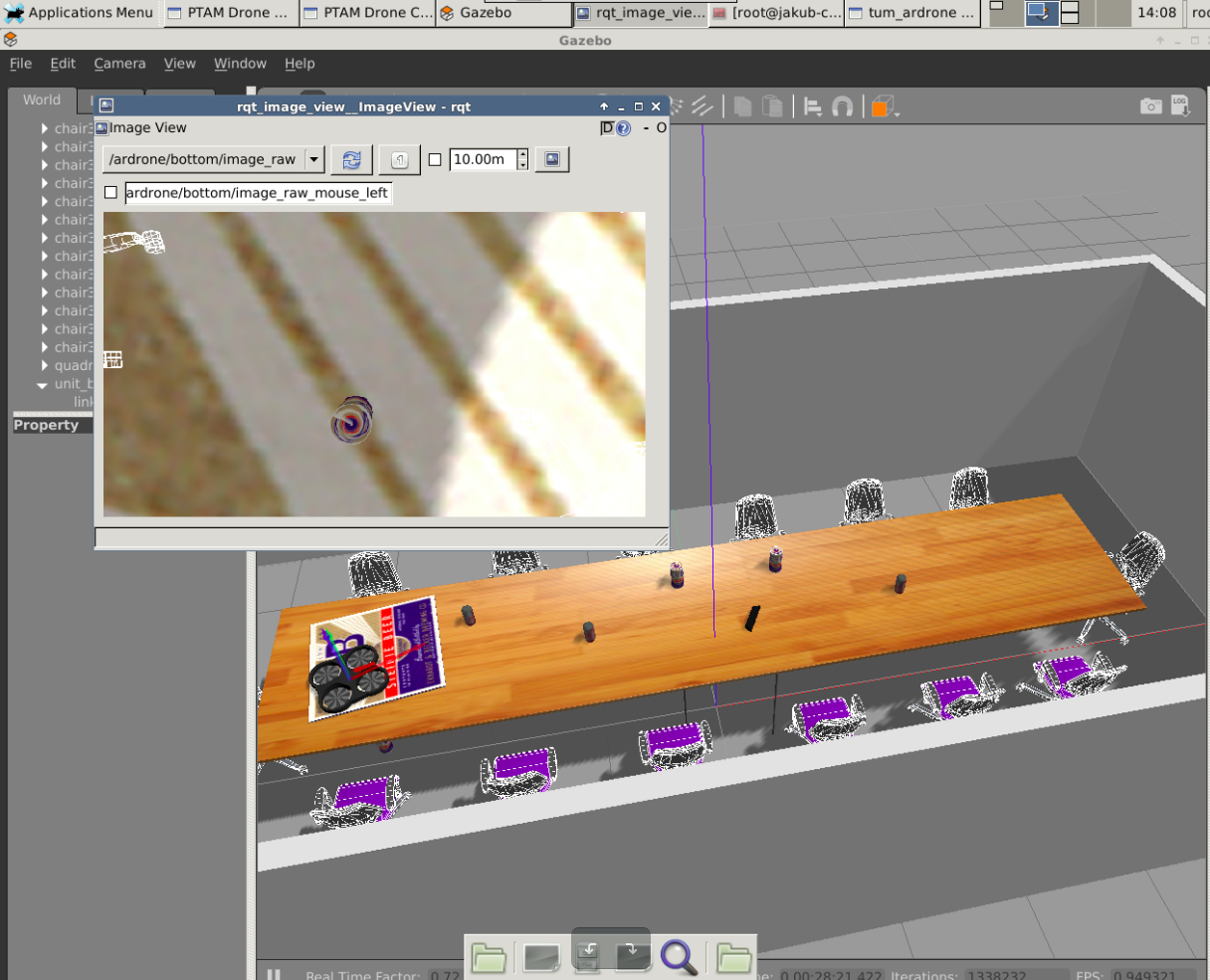
I am wondering, if there is a way to change the output to non-transparent. I was using rqt_image_view, and ROS Indigo with Gazebo 7.3.0.
Thanks!
add a comment
