
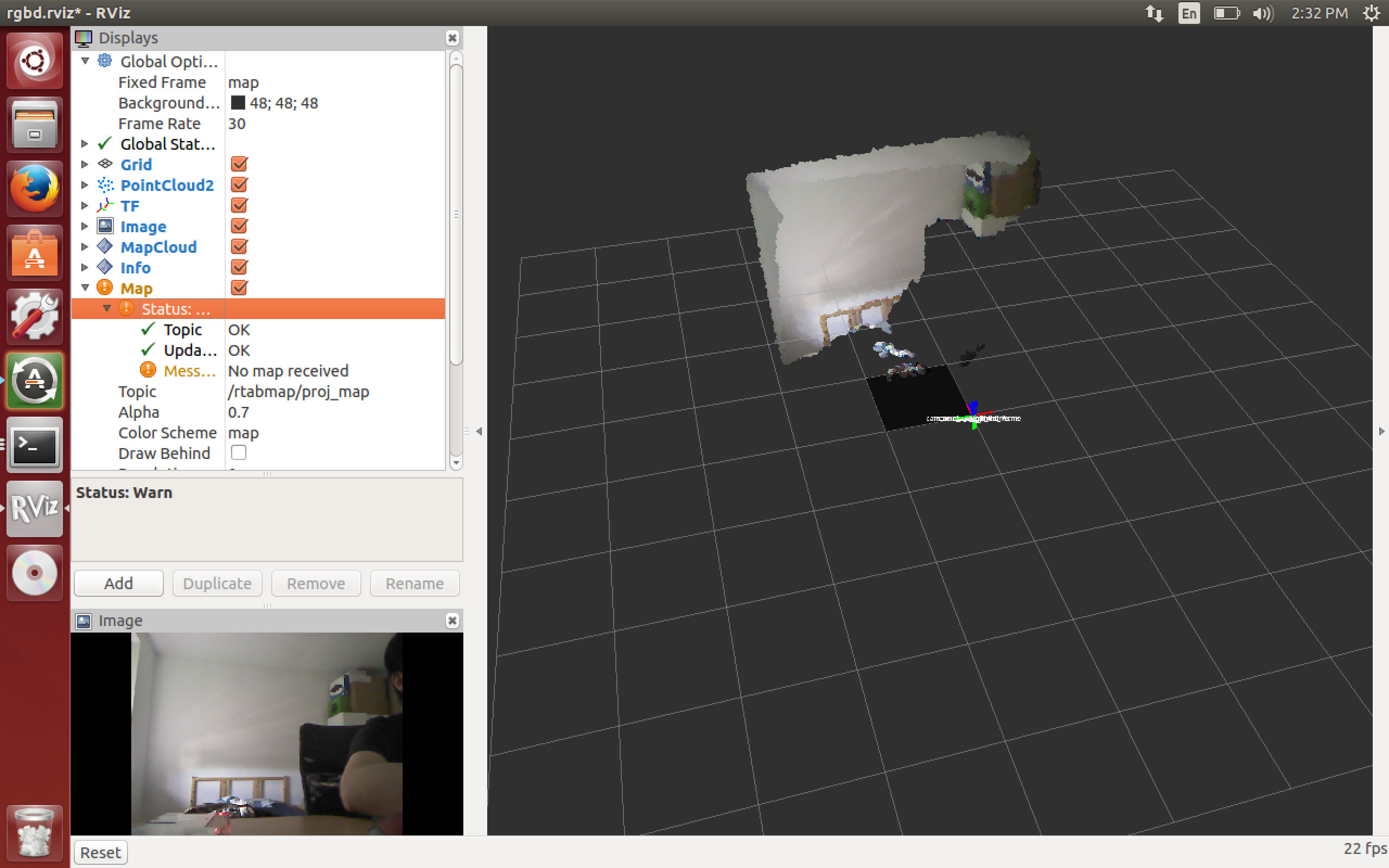
"no map received" in RVIZ, how to create map? I only got real time info in rviz
I'd like to create 2D or 3D map in RVIZ using Kinect v1.
I have Kinect v1 connect to Raspberry Pi2 (ubuntu 14.04, ROS indigo). And Ubuntu 14.04 local machine.
ROS_XXXs are all set correctly.
On raspberry:
roscore
roslaunch freenect_launch freenect.launch
rosrun depthimage_to_laserscan depthimage_to_laserscan image:=/camera/depth/image_raw
On local machine:
rosrun gmapping slam_gmapping scan:=base_scan
rosrun tf static_transform_publisher 0 0 0 0 0 0 1 map camera_link 10
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rviz:=true rtabmapviz:=false
now I can get real time info in Rviz, but no map received. How can I save the map when I move Kinect? Did I miss something??

I also the same condition, did you find solution?