
rospy diagnostic
host ubuntu 16.04
ros:kinetic
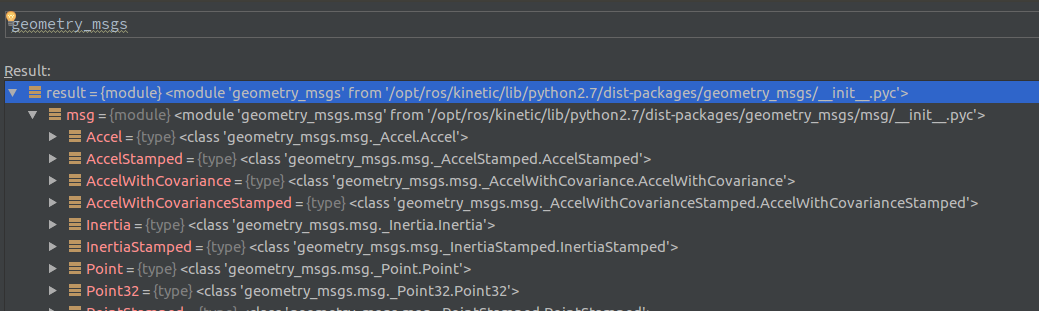
Other message objects imported with rospy seems to have (as expected) the msg as the only attribute with sub items for each message in the class/message group. for some reason import diagnostic_msgs returns an object with no msg attribute and therefor none of the expected/required messages
can someone else confirm the issue? or help with a solution
Output showing geometry_msgs and diagnostic_msgs in the debugger;

i can publish topics to the instance of ROS (via rosbridge) just fine, i just can create subscriber because of this issue.

Could I ask you to attach your screenshot to this question directly? I've given you enough karma to do that. Thanks.
@gvdhoorn, updated as requested. I was able to work around this by creating a custom message type (which was a non-trivial to get to work as well). So: a 10lb cure for a 1lb problem.