
I'm confused about publishing nav_msgs/Odometry message
I have some questions of the tutorial : Publishing Odometry Information over ROS to learn how to publish nav_msgs/Odometry message:
1. In this tutorial code, I'm confused about the transform part. 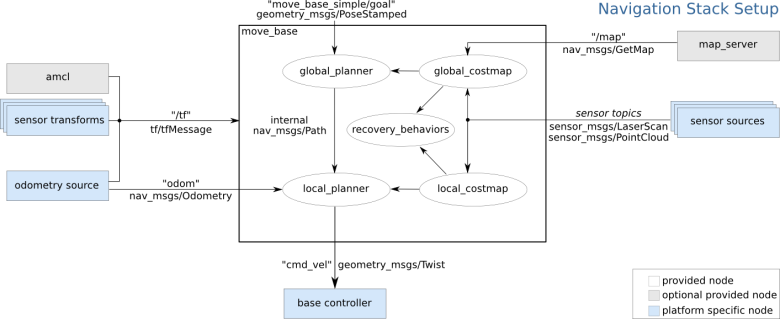
From the image of navigation stack, it only require "nav_msgs::Odometry". Why should we send "geometry_msgs::TransformStamped"? Since we set the same data in these two data structure.
2. Could I think the role of"odom" frame as the estimated pose of robot, and "base_link" as the origin (0, 0, 0) in the world?
3. In my robot case, I have a robot with motor encoder. Could I treat it as the odometry source just like below image?
4. Are the names of "frame_id" and "child_frame_id" changeable?
add a comment

