
ROS-i ABB driver - publish more than 6 variable through /joint_states
Dear all,
I am basically trying to send the translational and rotational positions of the tip (total 7 float variables) from RAPID to the ROS as a ros topic. I was thinking of using the /joint_states topic's velocity and acceleration vectors to contain these variables. The end result that I expect will be the /joint_states topic publishing the 6 out of 7 variables as a position vector element and the last variable as first element in velocity.
However, I cannot seem to send more than 6 variable (I tried to pack more raw data beyond 6) using the send_msg function in the ros-i abb's socket module and the ROS_StateServer module. Has anyone done this before? or is there any proper way or guide of publishing to ros from rapid?
Thank you in advance!
Edit: Hi gvdhoorn! Thank you so much for the quick, detailed and amazing reply!
Due to the time constraint, I went ahead with the measure 2 and I finally got it working! The issue was indeed the mapping from the ros pc side (industrial_robot_client).
However, the changes in controller_joint_names parameter did not work for me (for all robot models). Instead, I went to hard code the joint_names variable of abb_robot_state_node.cpp file in abb_driver/src and it worked out fine for me.
//initial configuration
// std::vector<std::string> joint_names = rsi.get_joint_names();
//changed configuration
std::vector<std::string> joint_names;
joint_names.push_back("trans_x");
joint_names.push_back("trans_y");
joint_names.push_back("trans_z");
joint_names.push_back("rot_q1");
joint_names.push_back("rot_q2");
joint_names.push_back("rot_q3");
joint_names.push_back("rot_q4");
Oh by the way, if it does not cause too much trouble for you, could you please tell me where I can do the
and finally extend the robot_state node to publish a ROS geometry_msgs/Pose (or perhaps a TF frame directly)
of the measure 1? This is so that I can change the name of rostopic and also cater for other type of messages. I could not find any function or variable that looks like it.
Again Thank you very much!
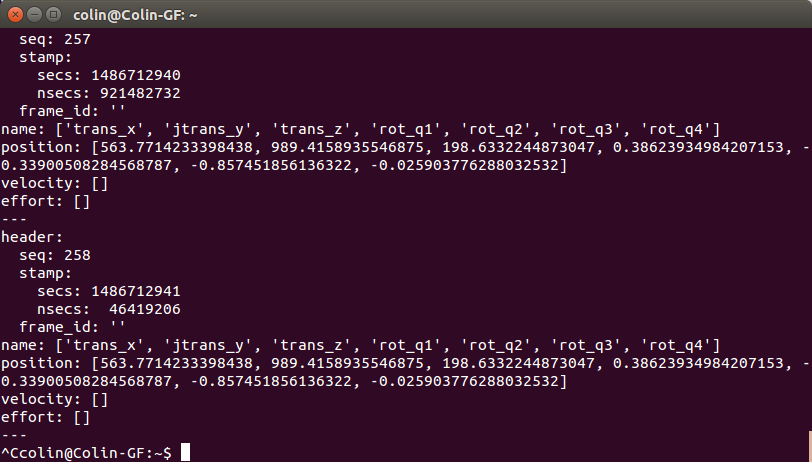

A comment: please don't use screenshots to show us what is essentially text (the console output). Just copy-paste the text and use the Preformatted Text button (the one with
101010on it) to properly format it.