
RViz 2d Nav Goal sends robot backwards
When I try to use the 2D Nav Goal the robot starts reversing at pretty high speeds.
Any guides on where to start to solve the problem?
Ask me for any launch files and such that you need to see as i'm new to ROS.
Thank you in advance.
this is a picture of the rqt_graph
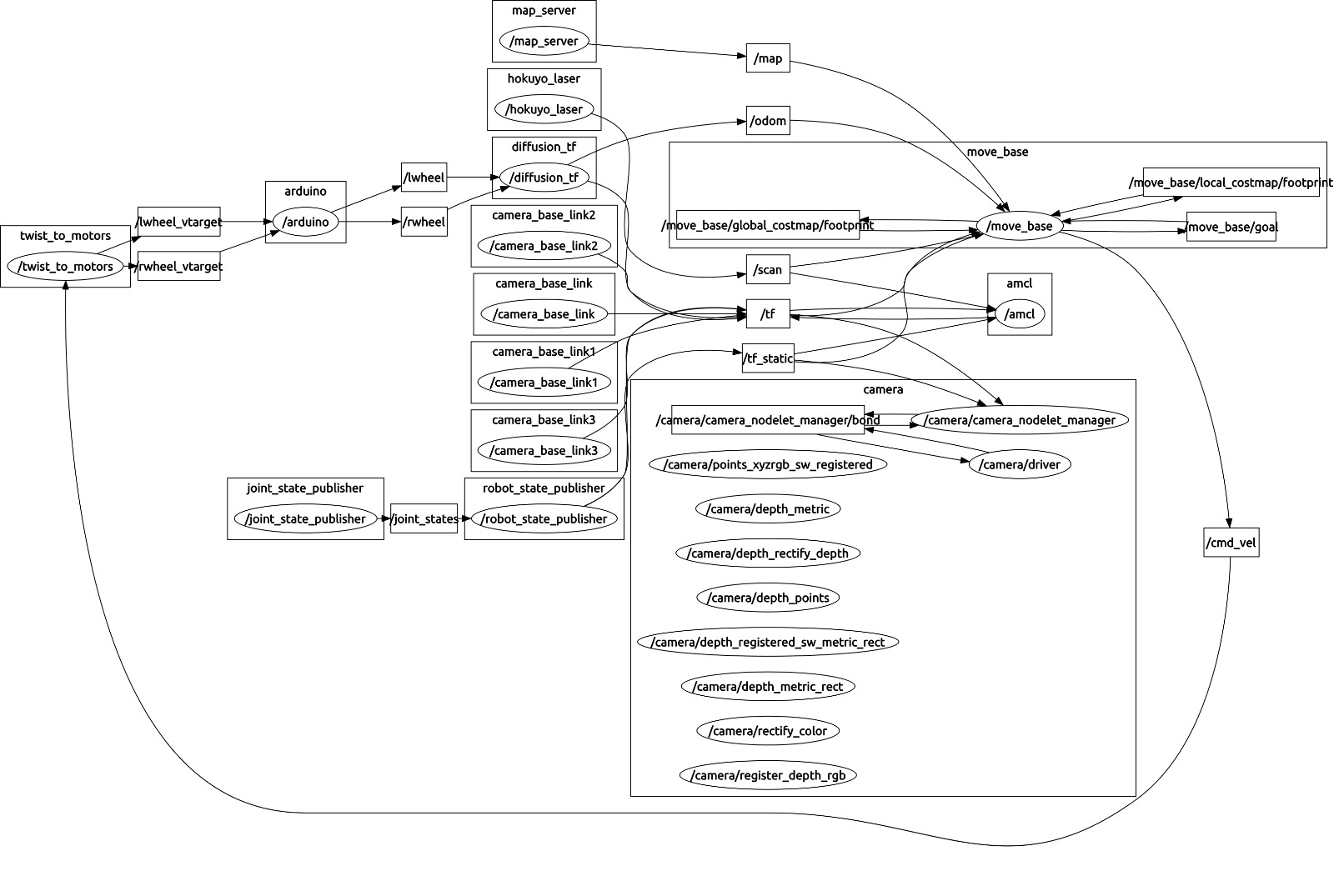

To start with: which robot are you controlling? Is this a commercial robot or a custom robot? You can start debugging by looking at the commanded x velocity on the
cmd_veltopic to see if move_base is commanding forward or backward movement.it's a custom robot, it was a handed down project, where do I find cmd_vel topic? the custom robot is able to do "roslaunch rbx_1_nav keyboard_teleop.launch" where i'm able to move the robot around with a keyboard along with a custom launch file which activates the nodes as far as i'm aware
If you have questions like "where do I find a topic" I'd suggest that you go do the ROS Tutorials. They're a bit long, but they do a very good job of introducing the core concepts in ROS such as messages, topics and services.
This is the rqt_graph of the custom launch file my senior made blob: https://web.whatsapp.com/dc0d34ac-314...
I had this issue on my custom robot, sounds hacky but I just switch the motor wires around :)
@Acecryz : that link doesn't work for me. You should have enough karma to post images directly if you edit your question.
@burf2000 that wouldn't make sense since the robot works fine using keyboard movement.
The
cmd_veltopic shows up on your rqt_graph; if you want to look at the x-velocity you can use rqt_topic, rqt_plot or justrostopic echo /cmd_vel.