
Questions about API
Q1: Why does API split into 3 parts, ROS, C++, Python respectively?
Q2: Why some of them are identical in the same row, while others different?
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Q1: Why does API split into 3 parts, ROS, C++, Python respectively?
Q2: Why some of them are identical in the same row, while others different?
Actually, you basically copied the answer in here as well :-)
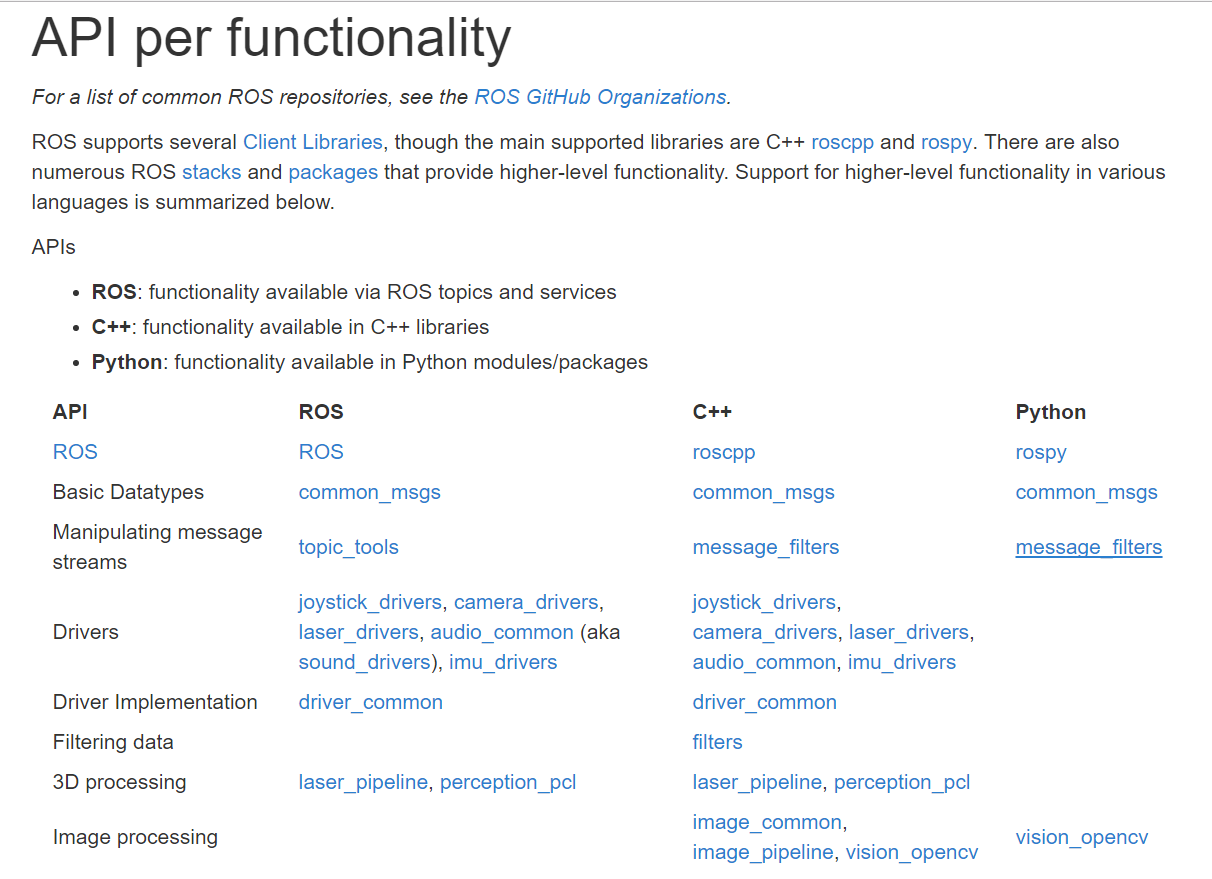
ROS: functionality available via ROS topics and services
C++: functionality available in C++ libraries
Python: functionality available in Python modules/packages
ROS has client libraries, roscpp and rospy that allow you to use ROS functionalities in C++ and Python code, respectively.
So, you have a C++ API), to e.g. use Publishers and Subscribers, as well as a Python API. Those two are obviously different.
From the outside, a topic looks, however, the same, wether it comes from a python or a C++ node. You can manipulate this e.g. using the topic_tools package, which are just ROS nodes written in either C++ or python.
However, this is only a very rough overview, don't get stuck too much on this list.
Asked: 2016-11-23 00:52:04 -0600
Seen: 401 times
Last updated: Nov 23 '16
Is it possible to have memory mapped messages in ROS?
cannot find libraries when linking
who is heading the development of ROS?
Publisher Subscriber Teleoperation -- High Latency?
How to correctly use git with ROS
Error importing android library into android project using rosjava.jar
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
