
moveit_ros_planning_interface API code
In moveit_commander.move_group.MoveGroupCommander class source code, In line 40,
> from moveit_ros_planning_interface import _moveit_move_group_interface
It raises my curiosity to find it out what it is.
Then I search moveit_ros_planning_interface trying to find more about this API,
however, I cannot find more about it
In ros index website,I click API doc on the right,
then click namespace and find moveit_ros_planning_interface
However, when I click moveit_ros_planning_interface , it only appears planning_interface,
I click it , and it links me to ros.org but it tells me
This page does not exist yet.
Q1: How can I find more info about moveit_ros_planning_interface and _moveit_move_group_interface within it?
Q2:
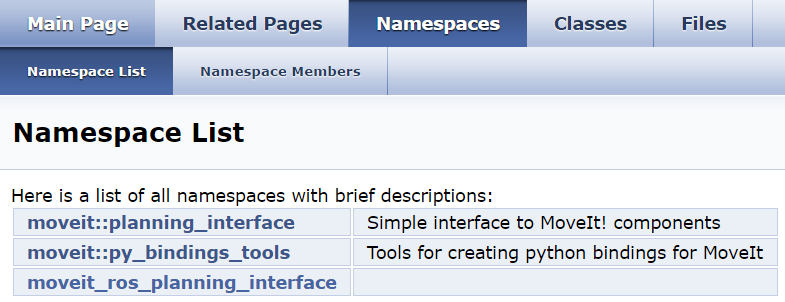
As figure shows, why do both planning_interface and py_bindings_tools have parent namespace moveit, while moveit_ros_planning_interface do not?
Q3: In moveit_ros repos, it says,
MoveIt ROS This repository includes components of MoveIt that use ROS. This is where much of the functionality MoveIt provides it put together. Libraries from MoveIt Core and various plugins are used to provide that functionality. - planning - planning interfaces - benchmarking - manipulation - visualization
Now I am confused with the concept of package and API, what is moveit_ros_planning_interface exactly?
Q4: In moveit_commander.move_group.MoveGroupCommander class source code,
00044 class MoveGroupCommander(object):
00045 """
00046 Execution of simple commands for a particular group
00047 """
00048
00049 def __init__(self, name, robot_description="robot_description"):
00050 """ Specify the group name for which to construct this commander instance. Throws an exception if there is an initialization error. """
00051 self._g = _moveit_move_group_interface.MoveGroup(name, robot_description)
Why there is ._g in __init__function ?
