
how to make the map thicker? (gmaping params)

I'm using the gmapping/slam_gmapping node to create the map using ros_arduino_bridge and neato_laser_driver with those the /odom , /scan, and /tf can be published.
I referred the parameter configuration of rbx1: here and I found that:
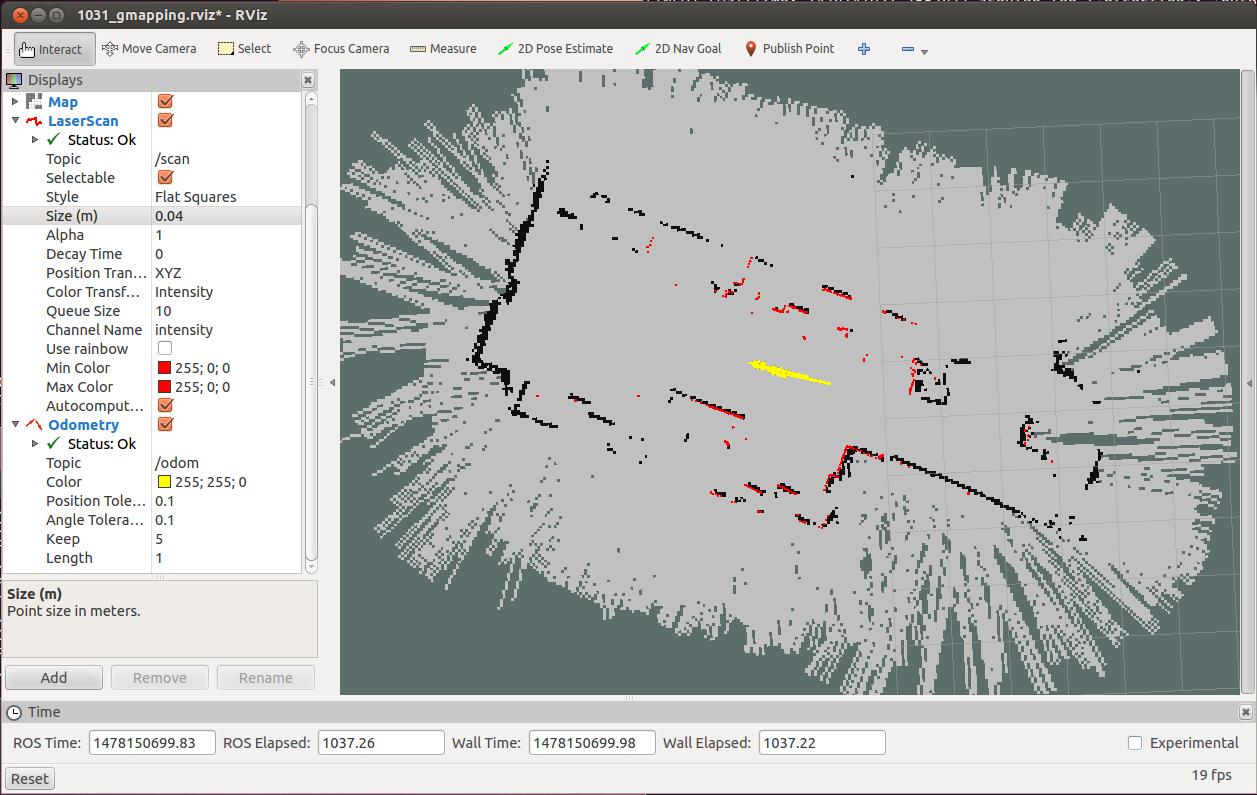
- the map is drawn lightly.
- there are many emissive lines which is not as the reality and should be get rid of.
Can you guys tell me which parameter of slam_gmapping influences these features?
Thank You Very Much!!
ps: I'm using the ros-indigo and neato_xv11 laser scanner. THX!!


The map did not get denser even I stay the robot at some position for 1 hour.