
rostopic echo /tf and rosrun tf tf_echo /ar_marker_9 /camera
Hi everybody I am using ROS indigo for Marker detection and Transformation results in Camera farme.Screenshot from 2016-07-08 09_32_38.png I have two way to get values.But I do not know how to save my values in rostopic echo /tf results that I see in window : in text file
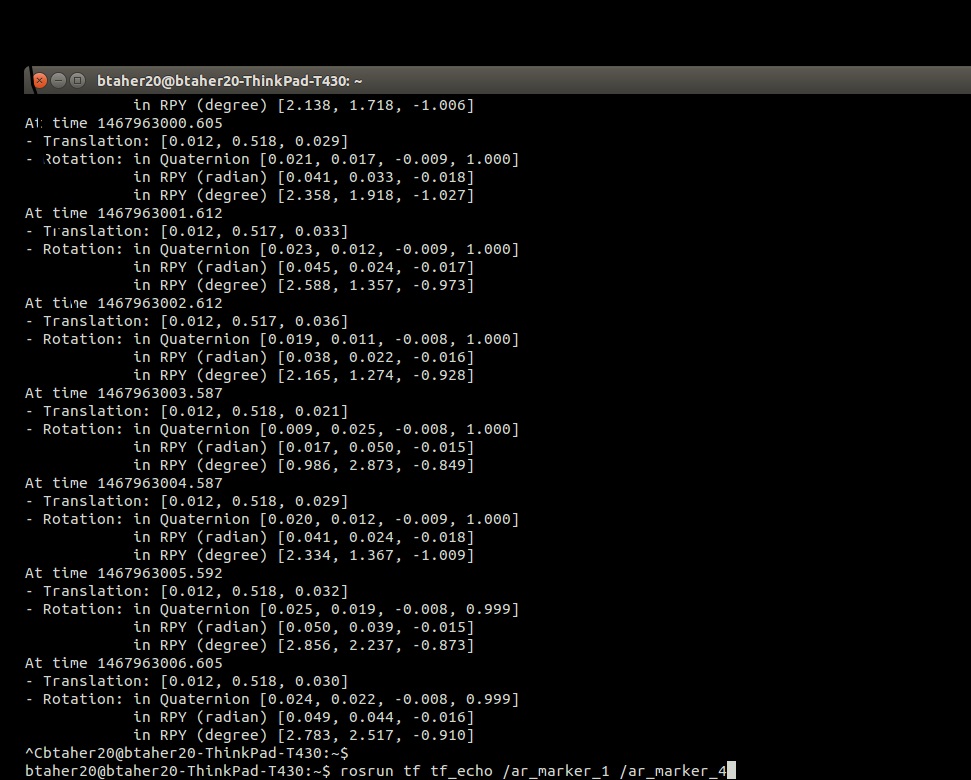
second from this----- rosrun tf tf_echo /ar_marker_9 /camera, command I can save in text files but I get 30 same values(t same, same x,y,z) in one second.But I want one second one results that is clear in messege.
wqw.jpg that I can see in my window but when I save it have differnt files I save with comamnd:rostopic echo -p /tf_echo /ar_marker_9 /camera > data.txt
Could you any body tell me what is wrong here.
Best Taher

{kind=link}
{kind=link}
The default rate of
tf_echois1. So you should be getting one result per second. In your screenshot, the time is not the same between results; they are about 1 second apart.