
Rviz Data using and savings for my application
Hi everybody I am using ROS Indigo Package and using this site for ARtags detection https://github.com/astups/artag
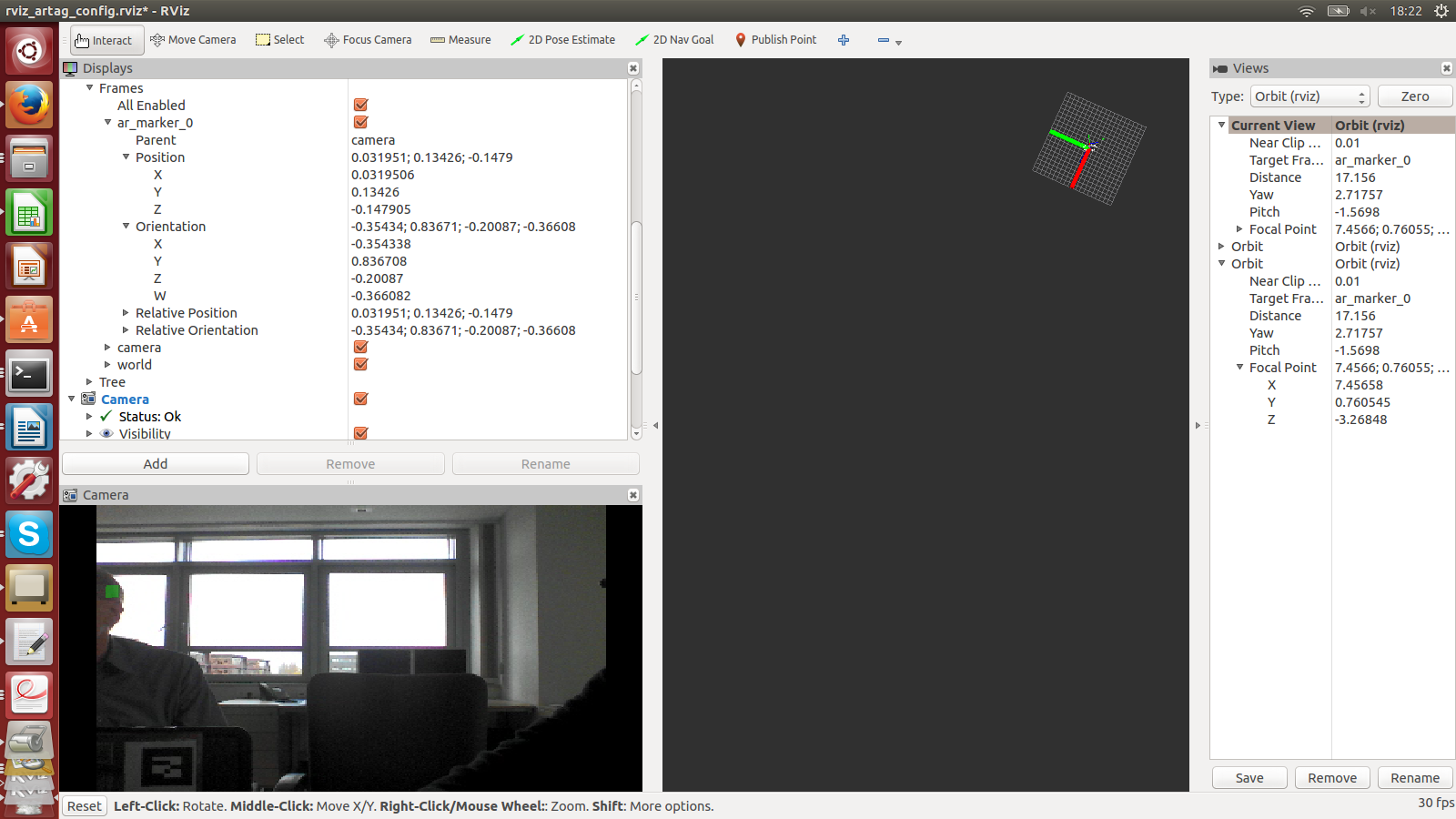
I got My Marker position detection and orientation
is there any user manual about full parameterization system of these 12 detected Screenshot from 2016-04-13 18:22:16.pngparameters value . Markers-- parents
Relative position and Orientation with respect to Camera/ Markers .what is their Unit ?
Markers-- parents
Relative position and Orientation with respect to Camera/ Markers .what is their Unit ?
My all parameter value just jumps,I need stable results for x,y,z values and How Can I get that.
Would any body suggest me to do that.Thanks in Advance
.Due to this problem I am confused about my results
Best Taher
add a comment

{kind=link}