
gmapping and laser scanmatcher -Scan Matching Failed, using odometry
Hi all,
I'm having a great deal of trouble getting anything approaching a reasonable result out of gmapping. I'm using the laser-scan_matcher, with IMU, to fake the Odom topic but still gmapping reports "Scan Matching Failed, using odometry" and makes a mess of any map up to that point.
This is my graph:
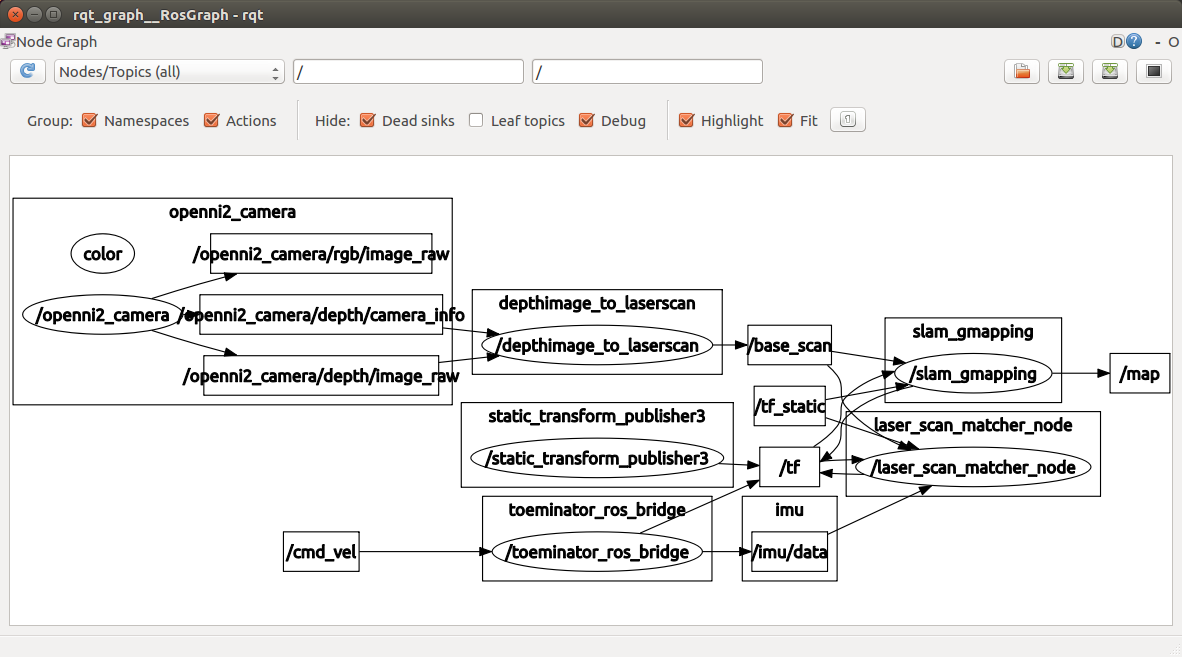
and gmapping launch file. I've tried various particles, angularUpdate and linearUpdate values. Nothing so far.
<param name="odom_frame" value="odom"/>
<param name="map_update_interval" value="1"/>
<param name="maxUrange" value="6.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.1"/>
<param name="astep" value="0.1"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.05"/>
<param name="angularUpdate" value="0.05"/>
<param name="temporalUpdate" value="-1.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
<param name="delta" value="0.025"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<param name="minimumScore" value="100"/>
Any help would be most appreciated.
Thanks
Mark

Quick googling for the error message returns some threads. Didn't any of those help?
Unfortunately not; no
Hey! I face up with the same error. Have you resolved the error?
I ended up changing to a Lidar and using Cartographer