
drift in hector_slam? [closed]
hi!
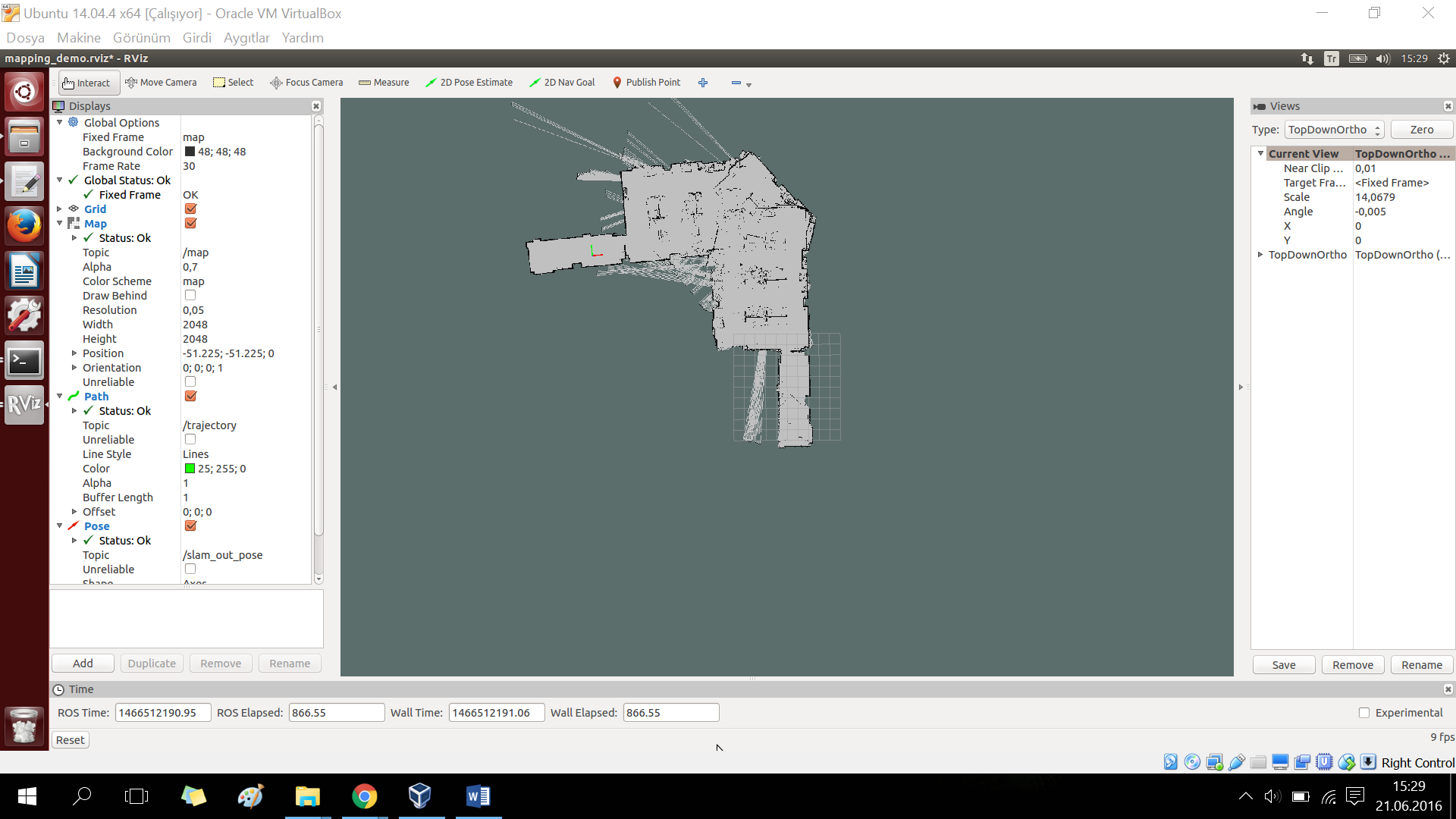
when i was creating map with hector_slam, the map slipped/drifted. It's not a minor drift so i wonder what's happening and how to avoid it? (especially i pay attention to rotating slow)
by the way i saw errors in the terminal like that.
update: now that editing option is back, i can edit my question for writing error -not just the screenshot :)
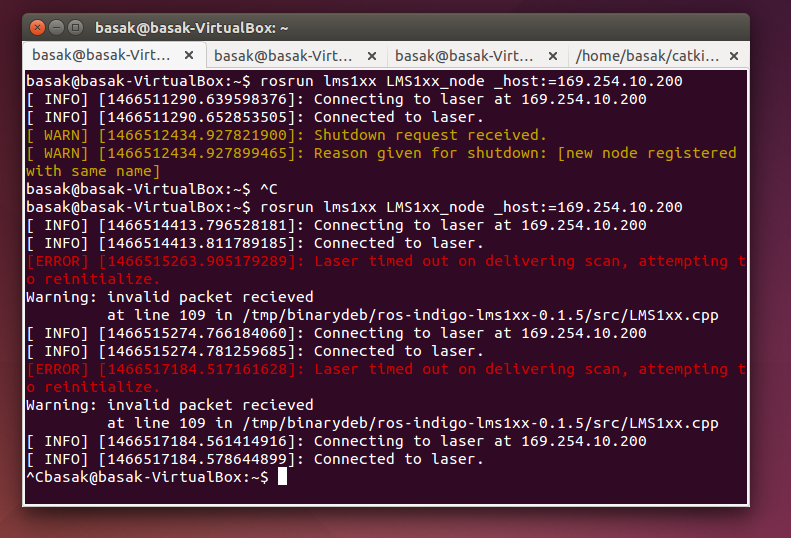
[ERROR] [Laser timed out on delivering scan, attempting to reinitialize.
Warning: invalid packet recieved at line 109 in /tmp/binarydeb/ros-indigo-lms1xx-0.1.5/src/LMS1xx.cpp
and in the virtualbox i can see that warning appears about ethernet connection (since i connect lms100 via ethernet)

IMO output should better be copy-pasted as text, not screenshot. We want to feed Google easier digestive food ;)
you are right, i didnt think of that :) now, i was gonna write the error message..but i cant edit now, whats wrong?
finally i could edit the question