
rviz can't find /map
hello everyone,
i use gmapping to subscibe a topic called scan which advertises data from laser.
when i run "rosrun gmapping slam_gmapping scan:=scan"
and "rosrun rviz rviz " ,but it show like this

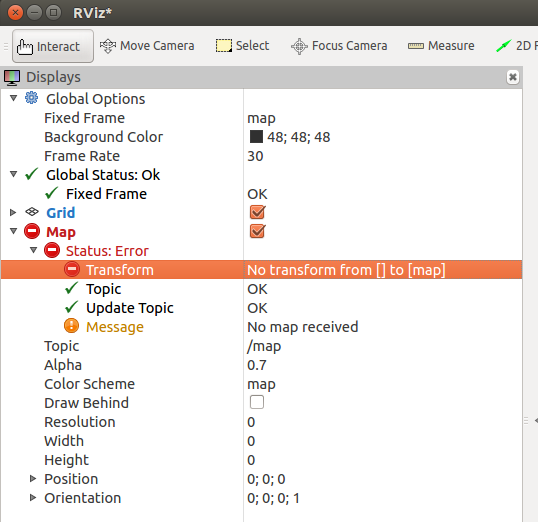
it shows nothing in rviz. i use indigo ,ubuntu14.04
do you have any idea about that? thanks a lot
add a comment

