
Basic understanding of how ros works
Hey I am quite new and I just want to ask how I install ROS and use it.
(General about ROS) E.g. I would like to install ROS on Linux Ubuntu 14.04 an Intel nuc board which is equipped with a wifi card. Now my question is:
(1) Is it possible to control ROS running on this intel nuc board with another PC via WIFI connection? (2) Can you send me a Link where I can find a description of how to do that? (3) Do you know if there is another good method controling ROS through space?
(4) Another question is: DO I alwayse have to start the roscore and the ros nodes running on the inteln nuc board with Ubuntu manually each time, or is there something like an option to install ROS as an Operating system such as windows or Ubuntu that the ros core starts right after pressing the start button.
(in particular what I want to do:) More detailed explanation of what I want to do: The main goal of my project is to determine very precisely the baseline(geometric distance) between a Rover(Quadrocopter) and a base station. Therefore I am looking around what the best hardware upset is and how to do that. My suggestions is:
Rover: I would like to buy an Intel nuc board (e.g:NUC5i5MYBE ) and run Ubuntu 14.04 on it. Then I would like to install ROS on it. Thereby I would like to install the RTKLIB package on ROS. Then I would like to connect this INTEL Nuc board with my quadrocopter controller by a serial port. The quadrocopter controller is connected to a u-blox: Neo M8T receiver (by UART?, USB?) (which is itself connected to a antenna). The quadrocopter is the rover.
Base station: As a base station(which is fixed) I want to use just another NEO M8T reciever. Note that the quadrocopter is flying (not fixed) in a range of max. 2km away from the fixed base station.
Goals to achieve:
Controling the Quad through the base station. Accurately determing its position. In the feature it should also be controlled some sensors connected to the intel nuc board.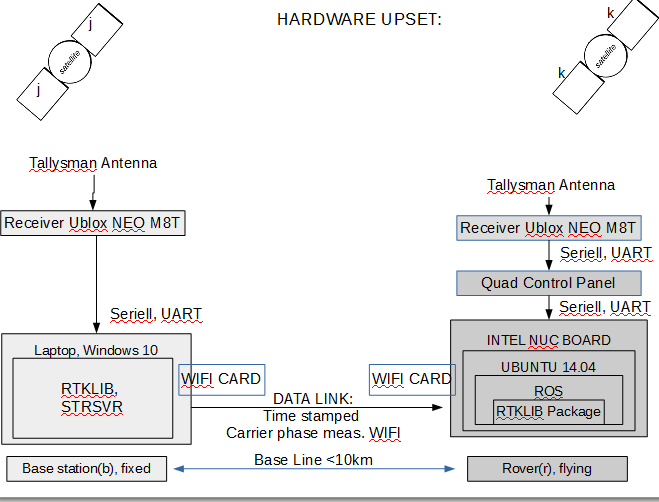
(5) What will be a good way to connect the NEO M8T receiver to the intel nuc board? (By UART?, USB?, SPI; DDC port). (6) Does anyone have some experienc with baud rates that RTKLIB (using the ROS package) needs to calculate in real-time a centimiter-level precise baseline. I mean what rate of bits have to be send over the UART or USB port between the receiver and the rover in what time to achieve such an accuracy. Is the NEO M8T a usefull receiver to accomplish this goal? (7) What is a good way to connect the base station with the rover. What kind of Data Link would you suggest I should use? One example would be using another PC as a base station, and running a STRSVR Server on this base ...


Are you familiar with the piksi from swiftnav? It might make things easier for you. I believe people have used it with the pixhawk.
Also, you might want to consider writing up a new question to capture the new information since it is pretty specific and people who know a lot about the problem won't know to look here with the current title of the question.
Thanks :).