
Problems with the map visualisation in Rviz (Ros Navigation)
Hey all,
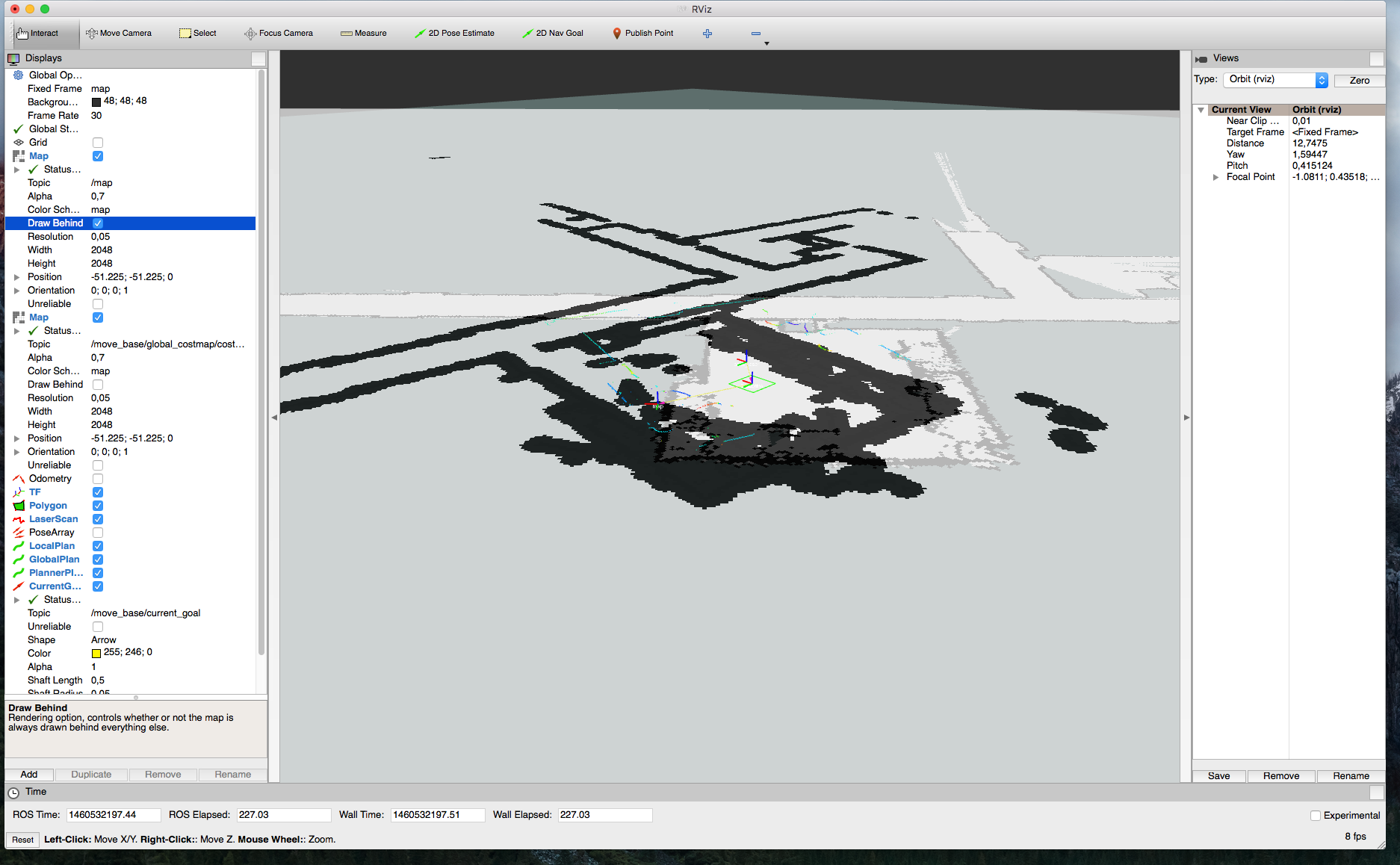
I have a problem with the map visualisation in rviz. The map and the global costmap are not correct overlayed. If i klick 2d Pose Estimate the position of the robot is in the global costmap correct but in the map is the position wrong.
Here is a example:
additional info: The OS with Rviz is osx El Captian. The Robots OS is Ubuntu tls 14.04 on a Raspberry Pi 2. The Problem exists already on an Ubuntu with rviz.
Many thanks for answers.
Max
add a comment
