MoveIt visual tools demo (visual_tools_demo.launch ) is not wotrking

I installed all the needed dependencies for running the MoveIt visual tools demo: visual_tools_demo.launch.
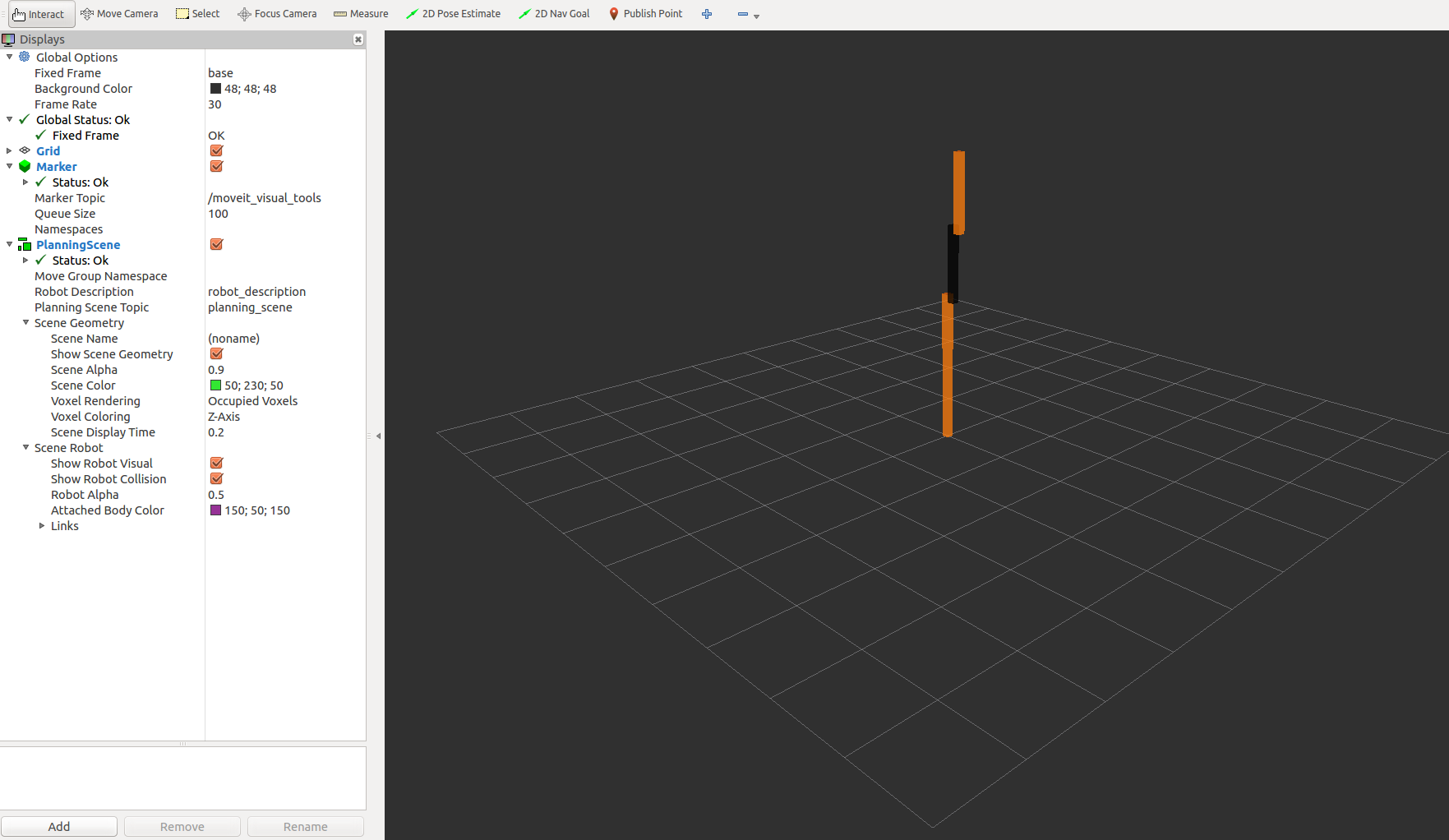
It seems that the figures are published, but they are nor showed in rviz.
The error message that I receive seems to be that the message published type is not the same as the listener is waiting for, but it is debatable, see the attached image Terminal.
This is the error:
[ERROR] [1460471289.382908506]: Client [/rviz_myuser_8324064928412942903] wants topic /moveit_visual_tools to have datatype/md5sum [visualization_msgs/Marker/18326976df9d29249efc939e00342cde], but our version has [visualization_msgs/MarkerArray/90da67007c26525f655c1c269094e39f]. Dropping connection.
This is the error image 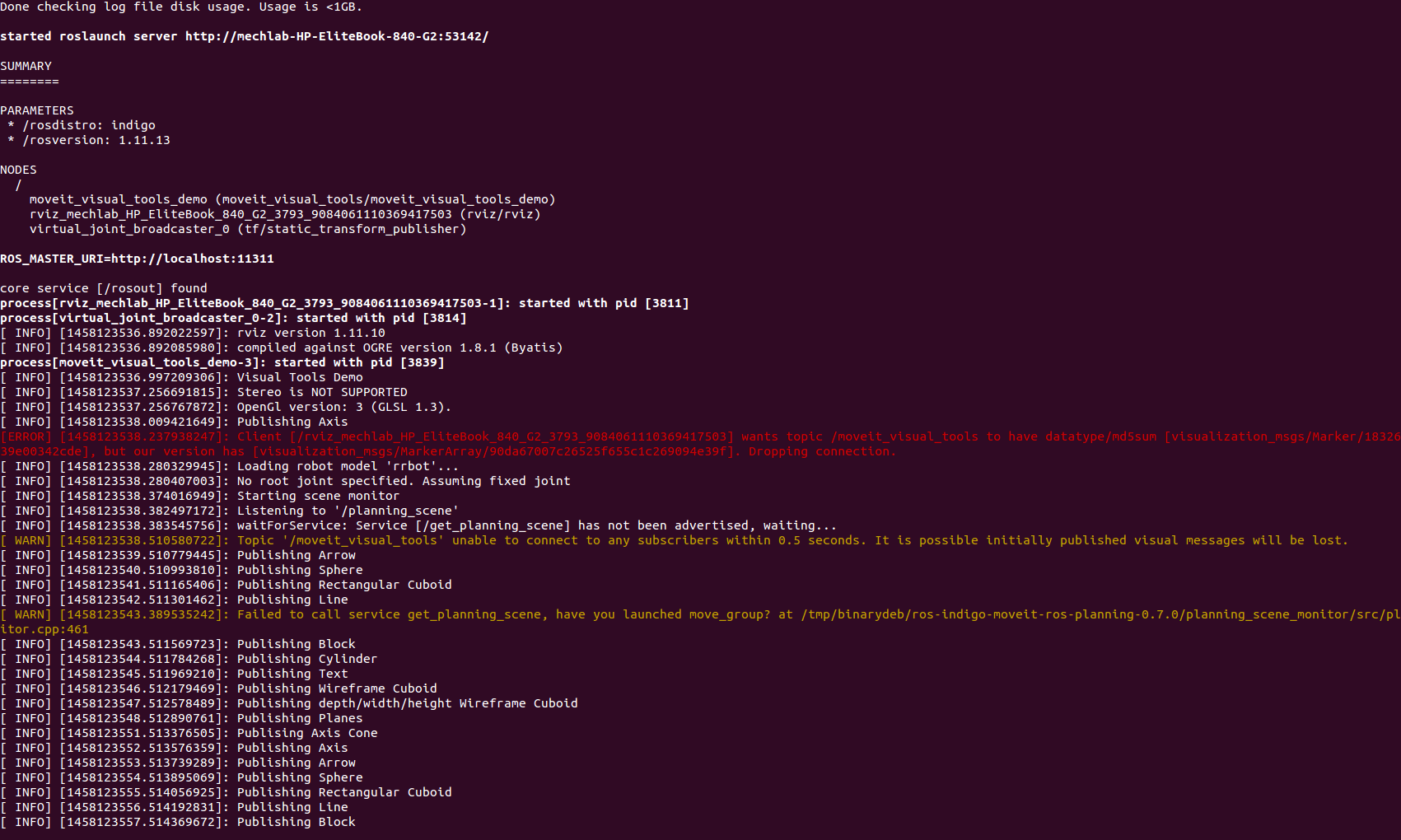 (/upfiles/14604709696160995.png)
(/upfiles/14604709696160995.png)
The rviz config image