
Why is rosaria not outputting velocity comands?
Hi all,
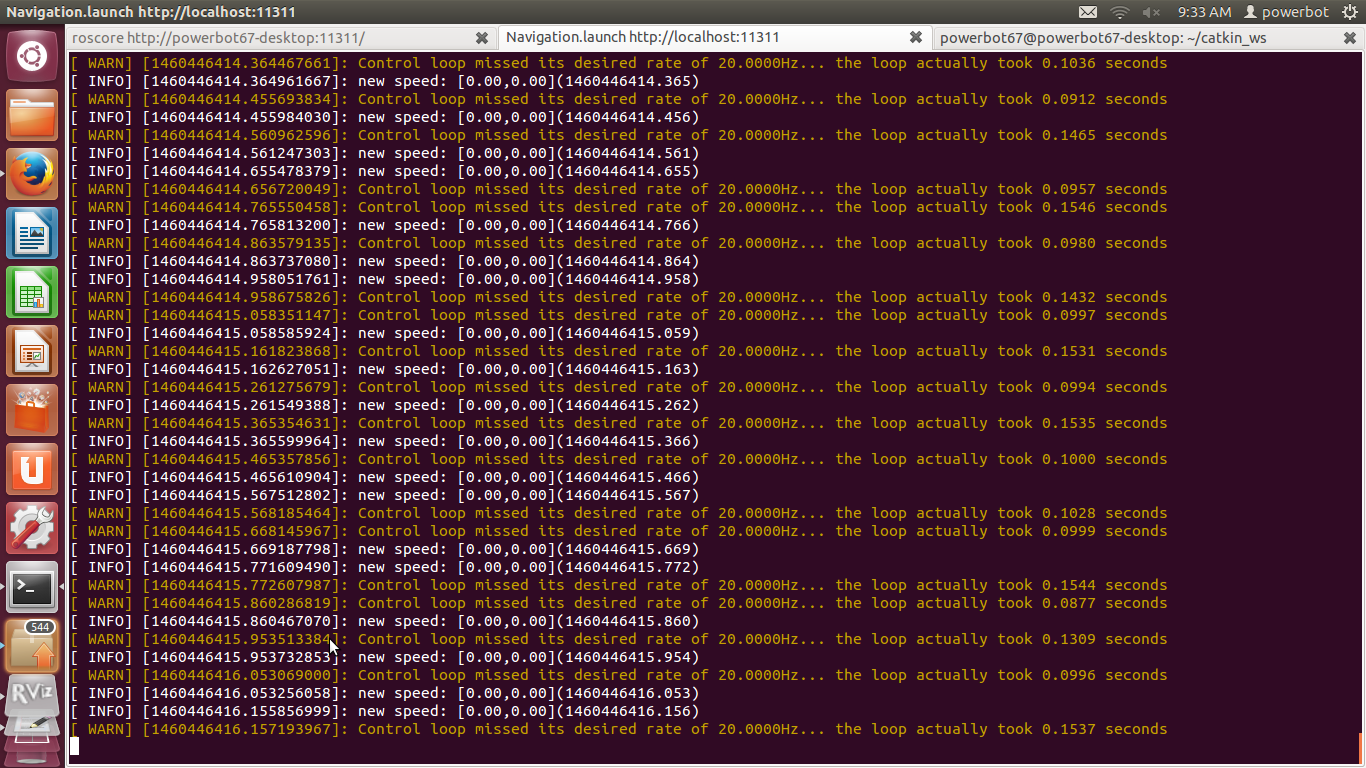
At certain points during the navigation, the robot stops without any apparent reason (the robot's path is not blocked). The terminal outputs the following warnings:
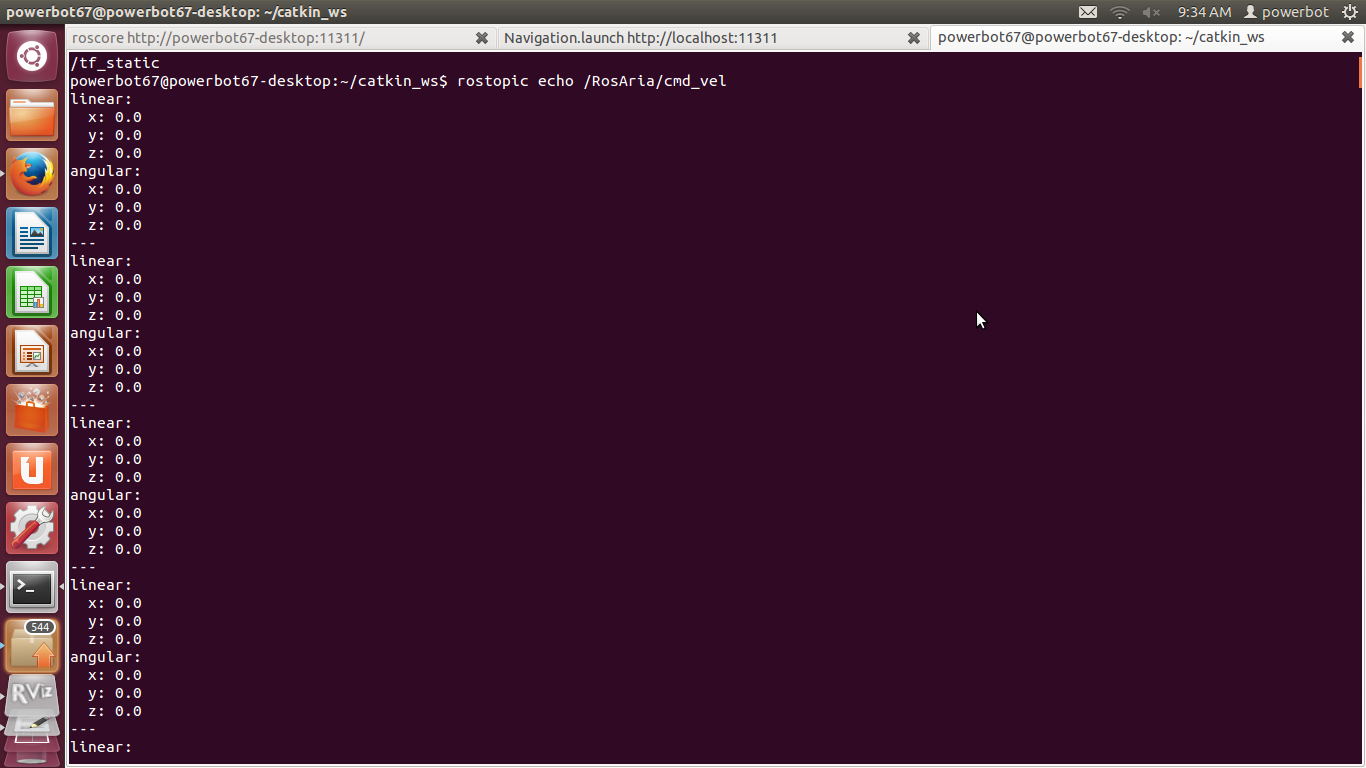
and when I checked the cmd_vel topic I got the following:
Any ideas as to why this happens?
Thanks

You should upload the code/s and explain a little bit more which is the situation. The problem could come from infinite sources.
What program/node is your first screenshot from? ROSARIA has some logging at debug level. You can also turn on some debug logging in ARIA to trace commands sent from ARIA to the robot. If you have 0 velocities in cmd_vel then probably your client is sending 0,0,0, or not sending commands.
The first screenshot is the terminal that runs my navigation launch file. I looks like move_base is not sending commands to RosAria but I don't know why it happens. Could it be because the processor has reached its processing limit?