
depth_image_proc point_cloud_xyzrgb
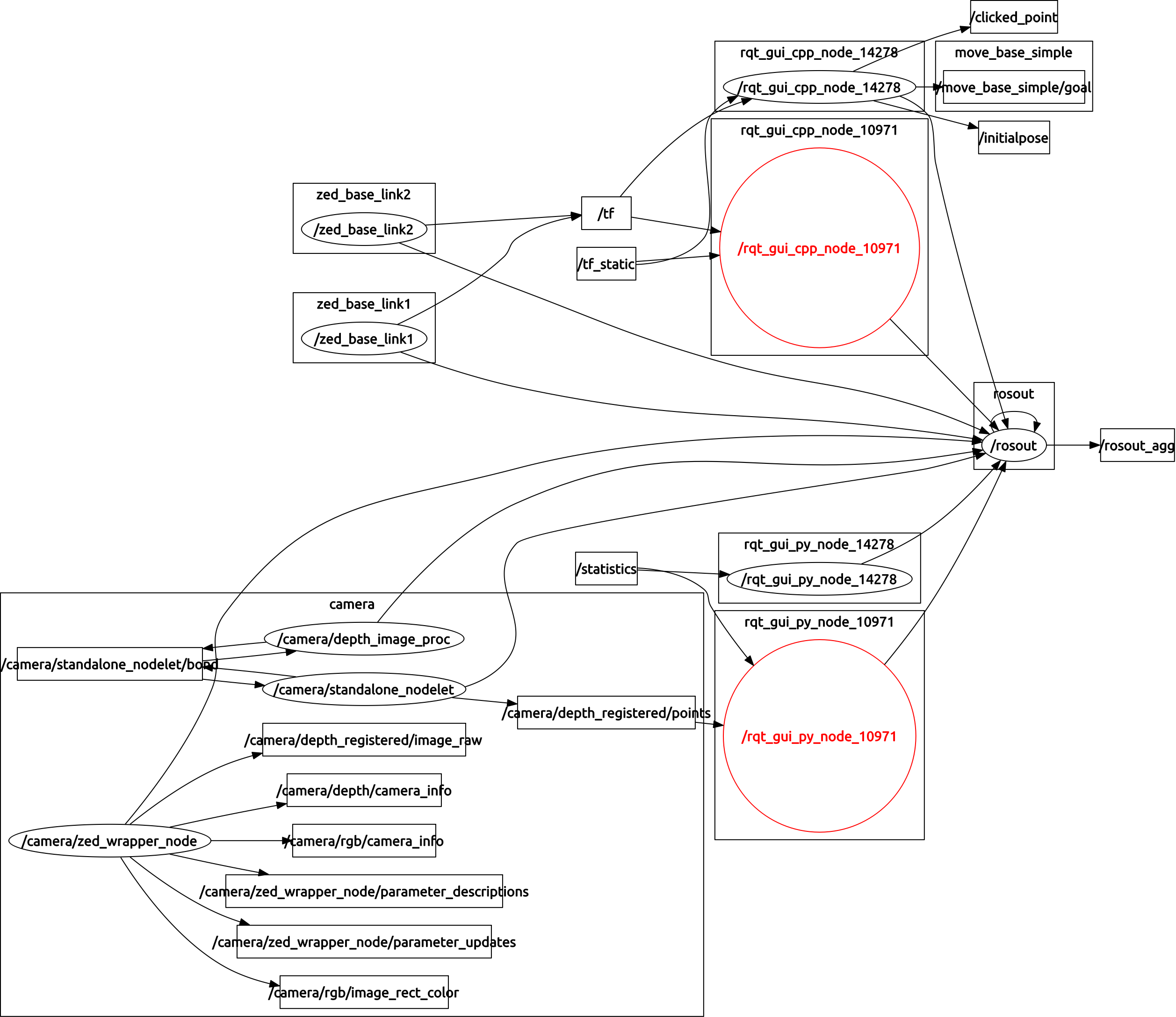
Trying to run depth image proc on remote pc. But not getting any images processed. Can someone look at my set up and see if it is the launch file or topic specification. It looks like depth image proc xyzrgb nodelet is not subscribing. rqt that generated the node graph is run on my main pc while the launch file is run on the remote.
<launch>
<include file="$(find zed_wrapper)/launch/zed_tf.launch" />
<arg name="computeDepth" value="1"/>
<arg name="svo_file" default=""/>
<group ns="camera">
<node name="zed_wrapper_node" pkg="zed_wrapper" type="zed_wrapper_node" args="$(arg computeDepth) $(arg svo_file)" output="screen">
<param name="resolution" value="2" />
<param name="quality" value="2" />
<param name="sensing_mode" value="1" />
<param name="frame_rate" value="15" />
<param name="left_topic" value="rgb/image_rect_color" />
<param name="second_topic" value="depth_registered/image_raw" />
<param name="left_cam_info_topic" value="rgb/camera_info" />
<param name="second_cam_info_topic" value="depth/camera_info" />
<param name="left_frame_id" value="/zed_optical_frame" />
<param name="second_frame_id" value="/zed_optical_frame" />
</node>
<node pkg="nodelet" type="nodelet" name="standalone_nodelet" args="manager"/>
<node pkg="nodelet" type="nodelet" name="depth_image_proc" args="load depth_image_proc/point_cloud_xyzrgb standalone_nodelet" output="screen">
</node>
</group>
</launch>
print of node info:
Node [/camera/zed_wrapper_node]
Publications:
* /camera/depth/camera_info [sensor_msgs/CameraInfo]
* /camera/depth_registered/image_raw [sensor_msgs/Image]
* /rosout [rosgraph_msgs/Log]
* /camera/rgb/image_rect_color [sensor_msgs/Image]
* /camera/rgb/camera_info [sensor_msgs/CameraInfo]
* /camera/zed_wrapper_node/parameter_updates [dynamic_reconfigure/Config]
* /camera/zed_wrapper_node/parameter_descriptions [dynamic_reconfigure/ConfigDescription]
Subscriptions: None
Services:
* /camera/zed_wrapper_node/get_loggers
* /camera/zed_wrapper_node/set_parameters
* /camera/zed_wrapper_node/set_logger_level
--------------------------------------------------------------------------------
Node [/camera/depth_image_proc]
Publications:
* /camera/standalone_nodelet/bond [bond/Status]
* /rosout [rosgraph_msgs/Log]
Subscriptions:
* /camera/standalone_nodelet/bond [bond/Status]
Services:
* /camera/depth_image_proc/set_logger_level
* /camera/depth_image_proc/get_loggers
add a comment
