
Map_server fails to publish transform
Map server node fails to publish transform when i execute the below launch file. All other nodes are functioning properly.
<launch>
<!-- Load the TortoiseBot URDF model into the parameter server -->
<param name="robot_description" textfile="$(find jmbot1_description)/urdf/jmbot1.1.urdf" />
<!-- Start Gazebo with a world containing a large building-->
<include file="$(find gazebo_ros)/launch/willowgarage_world.launch"/>
<!-- include file="$(find gazebo_ros)/launch/empty_world.launch"/ -->
<!-- Spawn a TortoiseBot in Gazebo, taking the description from the
parameter server -->
<node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model"
args="-param robot_description -urdf -model jmbot1.1 -x 8 -y -8" />
<!-- Convert /joint_states messages published by Gazebo to /tf messages,
e.g., for rviz-->
<node name="robot_state_publisher" pkg="robot_state_publisher"
type="robot_state_publisher"/>
<node name="map_server" pkg="map_server" type="map_server"
args="$(find mapping)/src/maps/willow.yaml" />
<include file="$(find amcl)/examples/amcl_diff.launch"/>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find jmbot1_description)/src/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find jmbot1_description)/src/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find jmbot1_description)/src/local_costmap_params.yaml" command="load" />
<rosparam file="$(find jmbot1_description)/src/global_costmap_params.yaml" command="load" />
<rosparam file="$(find jmbot1_description)/src/base_local_planner_params.yaml" command="load" />
</node>
</launch>
Below is my rviz results where the map's corner is oriented with the origin of rviz grid. I have verified the rqt_graph after launching the file, there is no transform published.
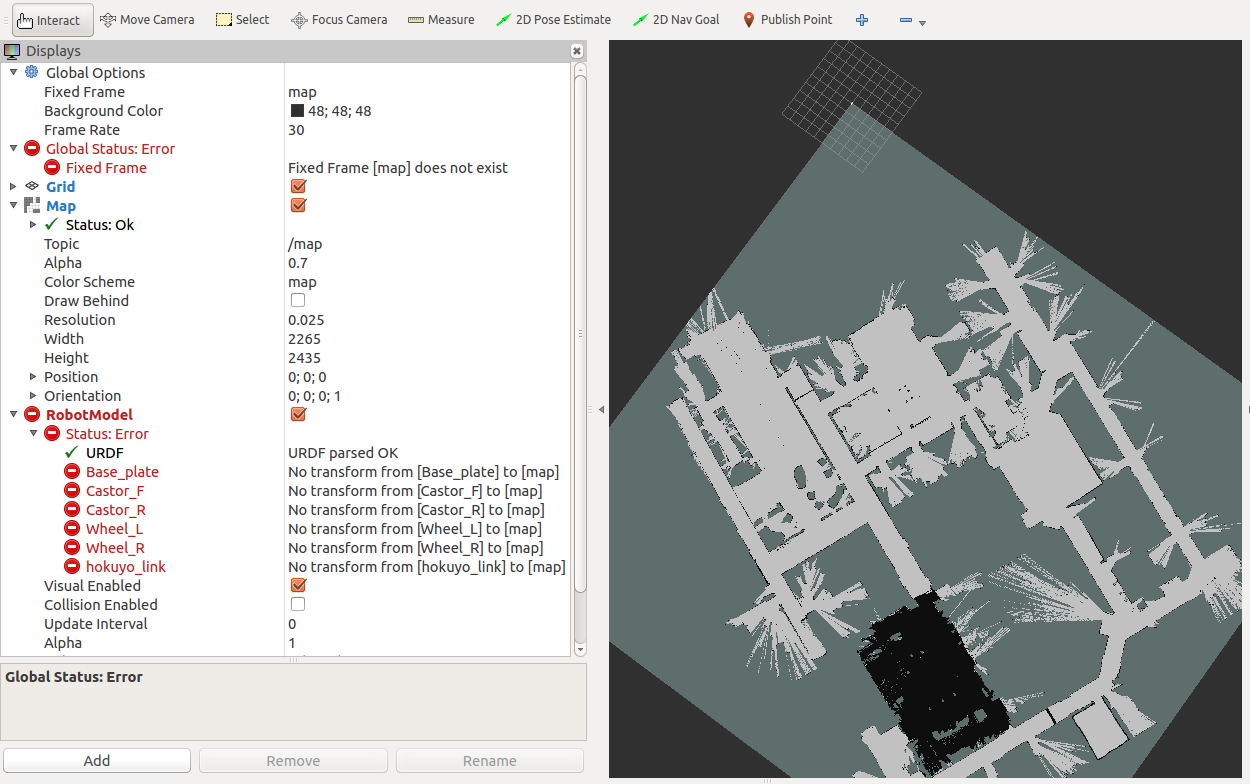
I have added the amcl node to the launch file as instructed in a book and i got into a new error as below. Please find the edited launch file above.
[ERROR] [1453990912.591443071, 49.843000000]: Couldn't transform from hokuyo_link to base_link, even though the message notifier is in use
add a comment


