
XV11 Producing poor maps with gmaping
I purchased an XV11 Neato "Lidar" from "GetSurreal", this one specifically: http://www.getsurreal.com/product/xv-... a few months ago.
However I was unable to create a usable map using ROS Gmapping. I can navigate an existing map made with the ASUS Xtion, but trying to use the XV11 Lidar to create a map in ROS was impossible.
Reading through the posts it sounds like some people here are using the XV11 Lidar with ROS Gmapping.
Rather than try to explain the issue, I will include a picture Can anyone point me to what I might be doing wrong that is causing this?
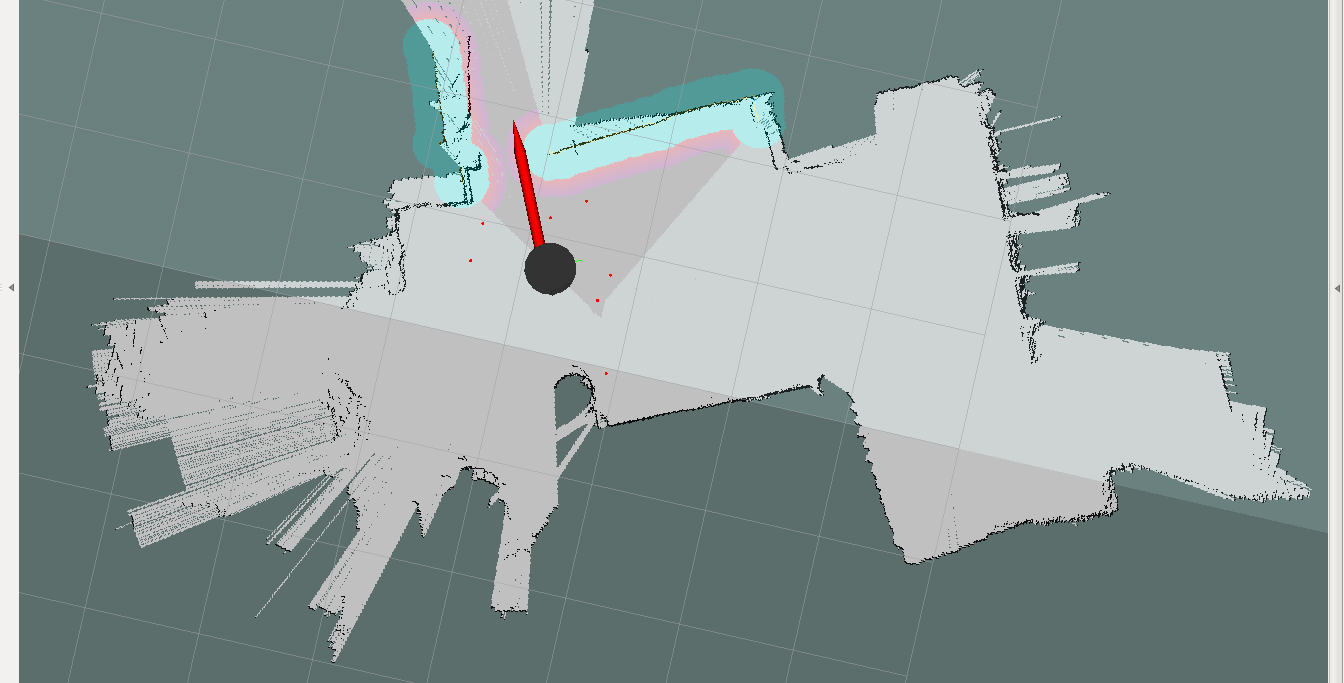
Here is what a map of the room using the ASUS 3D camear looks like:
Here is what the XV11 produces:
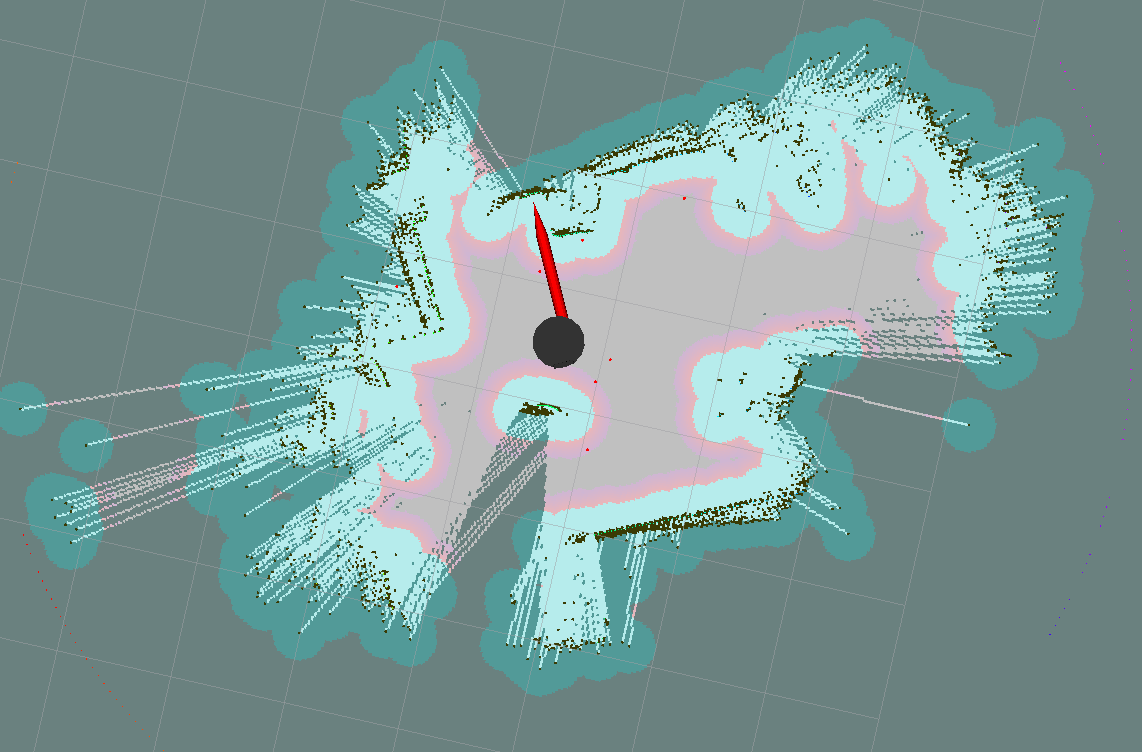
Notice how the ASUS makes neat clean walls, while the XV11 produces odd dotted lines that eventually spread apart.
Note that both are mounted on the robot, so odometry and everything else is exactly the same. The only difference is their height.
