
robot_localization : no filtered odometry with visual odometry
Hi,
There is no filtered odometry from robot_localization when I put visual odometry as an input. Interesting thing is that robot_localization successfully produces a filtered odometry when I put wheel odometry instead of visual odometry. Both visual odometry and wheel odometry uses same ros message (i.e. nav_msgs/Odometry). The launch file is follows.
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_localization" clear_params="true">
<param name="frequency" value="20"/>
<param name="sensor_timeout" value="0.1"/>
<param name="two_d_mode" value="true"/>
<param name="map_frame" value="map"/>
<param name="odom_frame" value="odom_combined"/>
<param name="base_link_frame" value="base_footprint"/>
<param name="world_frame" value="map"/>
<param name="transform_time_offset" value="0.0"/>
<param name="odom0" value="/visual_odometer/odometry"/>
<rosparam param="odom0_config">[true, true, false,
false, false, true,
false, false, false,
false, false, false,
false, false, false]</rosparam>
<param name="odom0_differential" value="false"/>
Any comments would be appreciated.
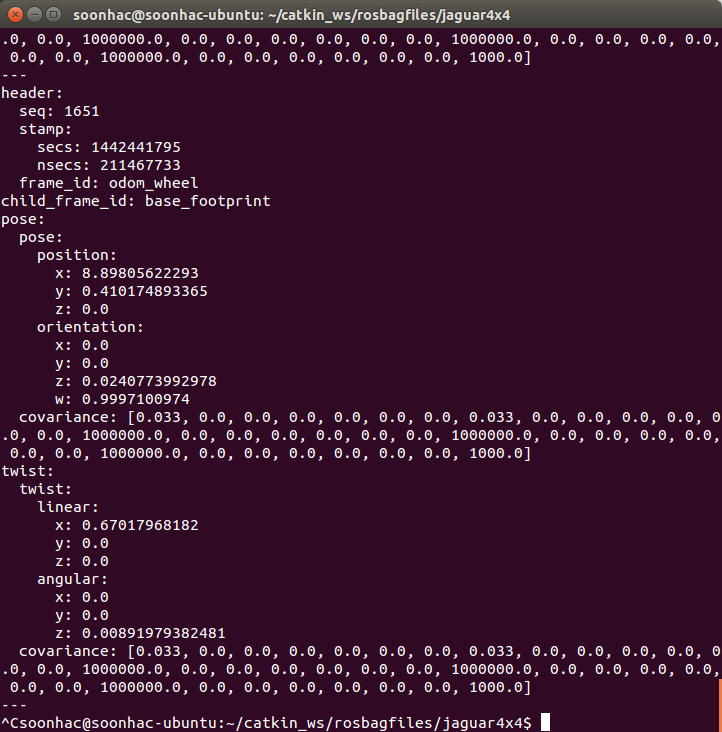
[Example of wheel odometry]
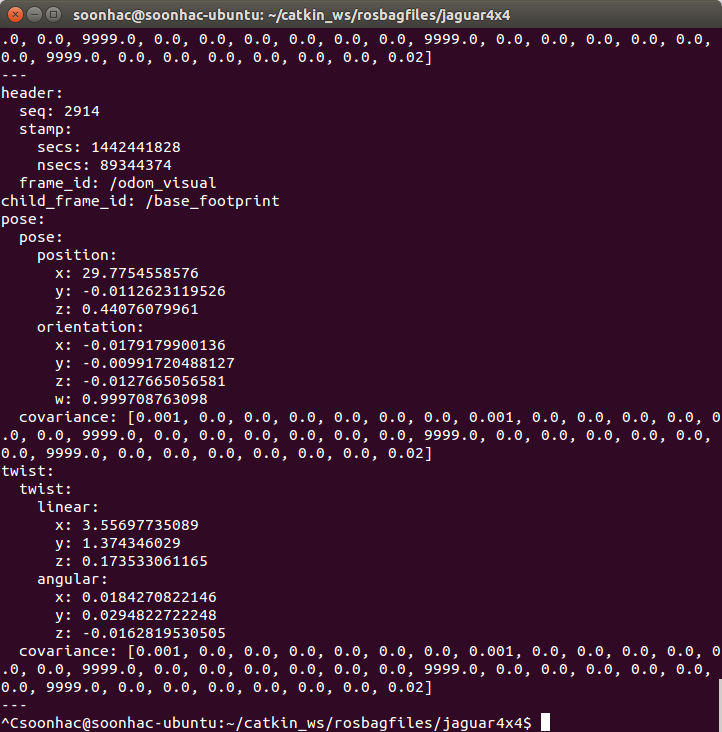
[Example of visual odometry]



Can you please post a sample message from each input?
Hi Tom, I post sample messages above.
Having the same issue with the output from rtabmap. Did you find a solution?
Do the
frame_ids inrtabmapstart with forward slashes?