
Problem in using gmapping with tf (tf2_msg/tfMessage) topic
Hi folks,
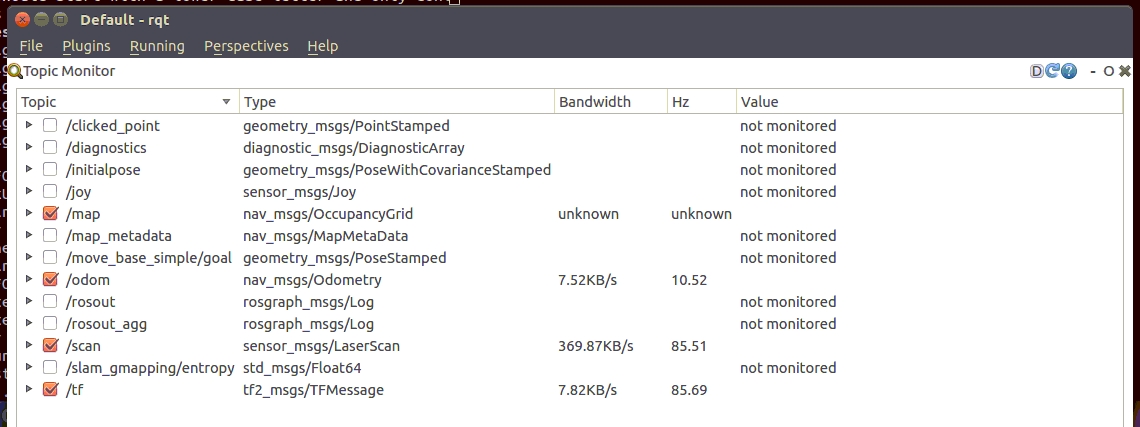
I am trying to use the gmapping node which subscribes to tf (tf/tfMessage) and scan (sensor_msgs/LaserScan) topics but the published topics (map and map_metadata) are unknown. I guess the problem is that I am publishing tf (tf2_msgs/tfMessage) instead of tf (tf/tfMessage) but I don't know how to solve it.
Any ideas?
Thank you very much in advance
I launch gmapping using the following code
<node pkg="gmapping" name="slam_gmapping" type="slam_gmapping" args="scan:=scan" respawn="false" output="screen">
</node>
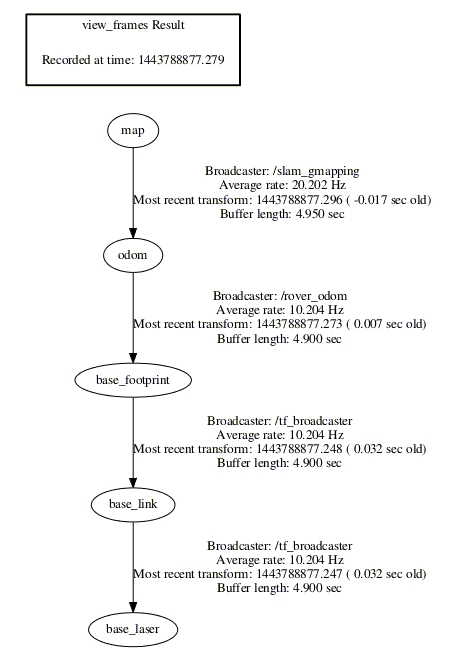
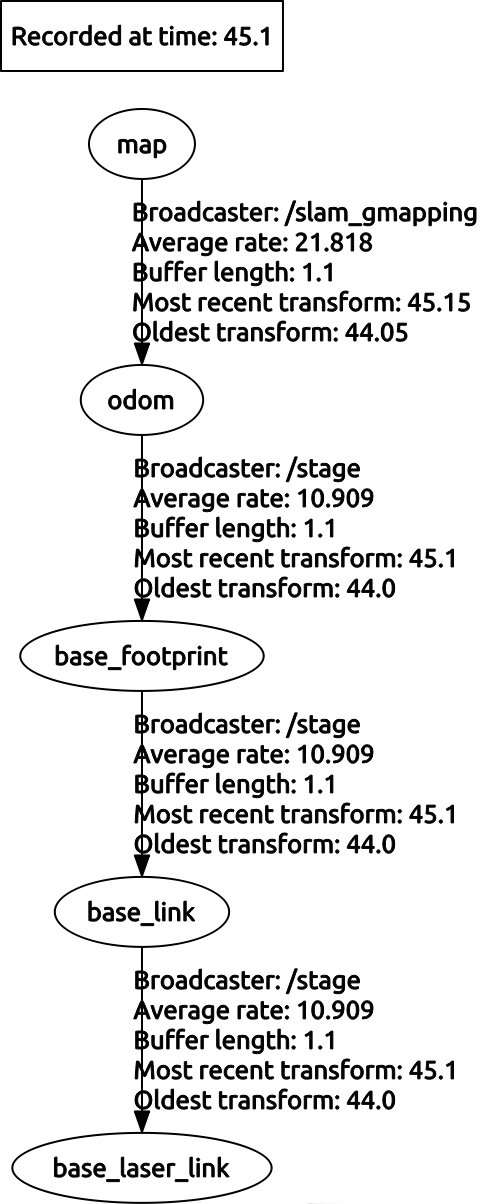
Edit: Here is my tf Tree
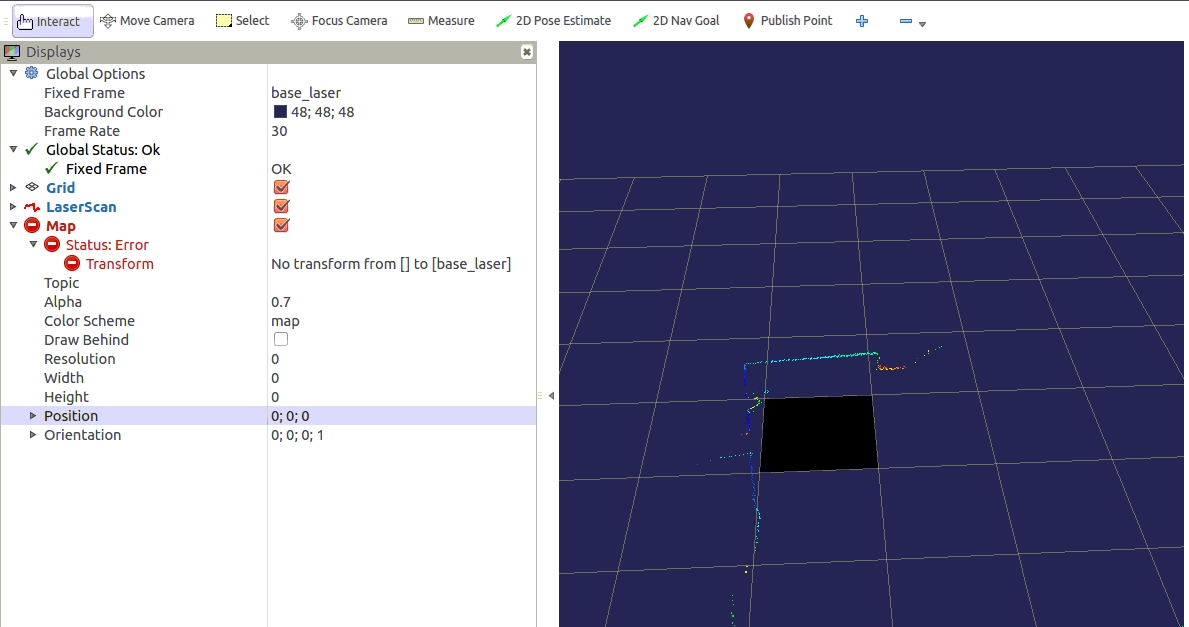
And my rviz view:
My topics being published:
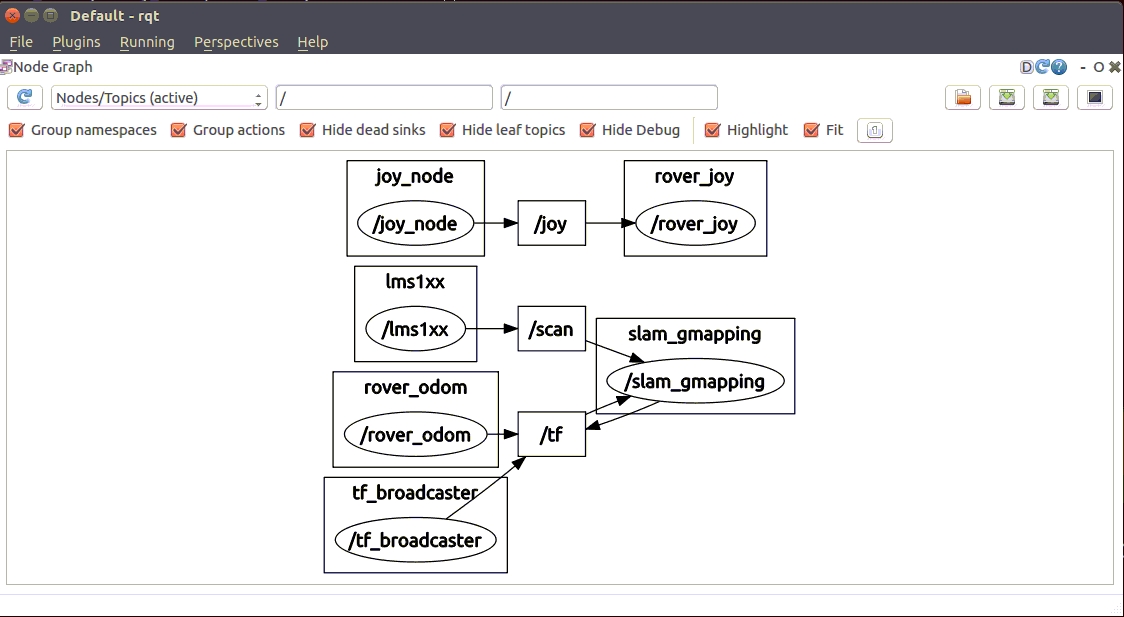
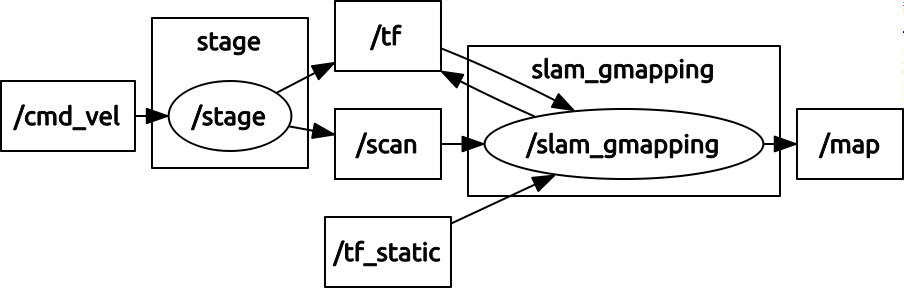
And my node graphs

Hi, your question is that when you use
rostopic echo /mapand there is none map data, right ?