OpenRave is not being actively developed anymore, as far as I know. The latest release is 0.8.2 which is 3 years old. Nevertheless, official Wiki on IKFast states:
The closed-form code generated by
ikfast can produce solutions on the
order of ~4 microseconds! As a
comparison, most numerical solutions
are on the order of 10 milliseconds
(assuming good convergence).
Also, I have done some tests about a year ago both on x86 (Intel i7, 4 cores + HT) and on ARM (Xilinx Zynq 7000, 2 cores). Kinematics model is a typical 6-DOF KUKA and IKFast solver is Transform6D. So the figures were as follows:
x86
-- Forward kinematics
Overall time: 54570 us
Samples: 300000
Min: 0 us
Max: 72 us
Avg: 0 us
-- Inverse kinematics
Overall time: 3146303 us
Samples: 300000
Min: 2 us
Max: 78 us
Avg: 10 us
Xilinx Zynq:
-- Forward kinematics
Overall time: 1152121 us
Samples: 300000
Min: 3 us
Max: 93 us
Avg: 3 us
-- Inverse kinematics
Overall time: 24644975 us
Samples: 300000
Min: 40 us
Max: 831 us
Avg: 82 us
The zeros in results for x86 are due to rounding.
These test were done to get a rough idea on timing/latencies distribution for real-time control. I also have somewhere the data for Xilinx Zynq with Xenomai patched kernel, so if you are interested I will try to find it.
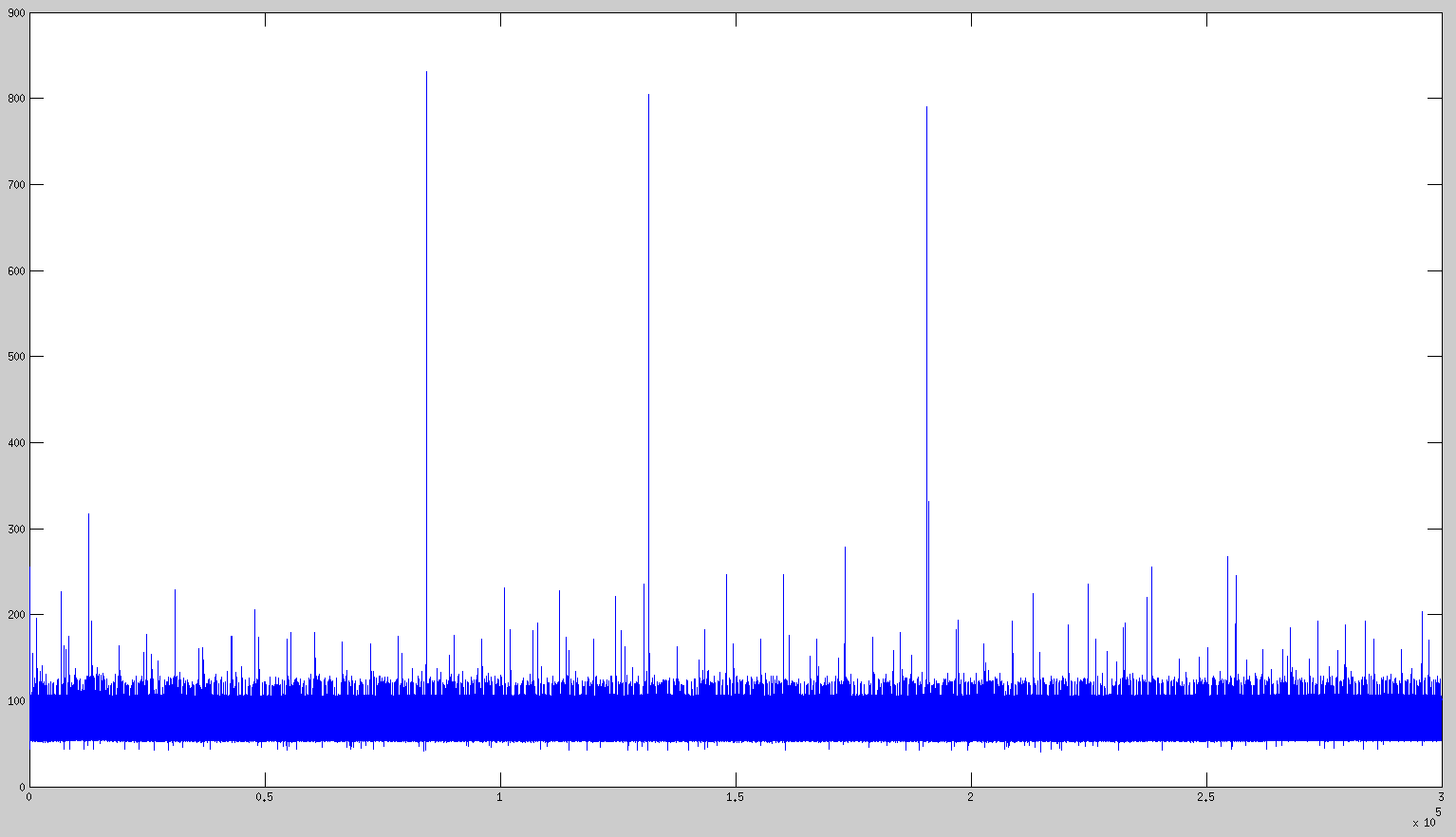
Here is also timing distribution for IK on Zynq without Xenomai:




As this is purely an OpenRave/IKFast question, I think you'd better ask this on openrave-users (which I believe you already found).
As to your code: it is really old (2012), so it might be that in newer versions it has changed.
Hi gvdhoorn, I posted the question here because this code was given in ROS wiki http://wiki.ros.org/Industrial/Tutori...
Do you know where I can find the latest version?
That still doesn't make it a ROS problem. All that code was generated by OpenRave scripts, not ROS.
In more recent OpenRave distributions, I'd guess.
Ok........