
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
OpenRave is not being actively developed anymore, as far as I know. The latest release is 0.8.2 which is 3 years old. Nevertheless, official Wiki on IKFast states:
The closed-form code generated by ikfast can produce solutions on the order of ~4 microseconds! As a comparison, most numerical solutions are on the order of 10 milliseconds (assuming good convergence).
Also, I have done some tests about a year ago both on x86 (Intel i7 with, 4 cores + HT) and on ARM (Xilinix Zynq 4000, 2 cores). Kinematics model is a typical 6-DOF KUKA and IKFast solver is Transform6D. So the figures were as follows:
x86
-- Forward kinematics
Overall time: 54570 us
Samples: 300000
Min: 0 us
Max: 72 us
Avg: 0 us
-- Inverse kinematics
Overall time: 3146303 us
Samples: 300000
Min: 2 us
Max: 78 us
Avg: 10 us
Xilinx Zynq:
-- Forward kinematics
Overall time: 1152121 us
Samples: 300000
Min: 3 us
Max: 93 us
Avg: 3 us
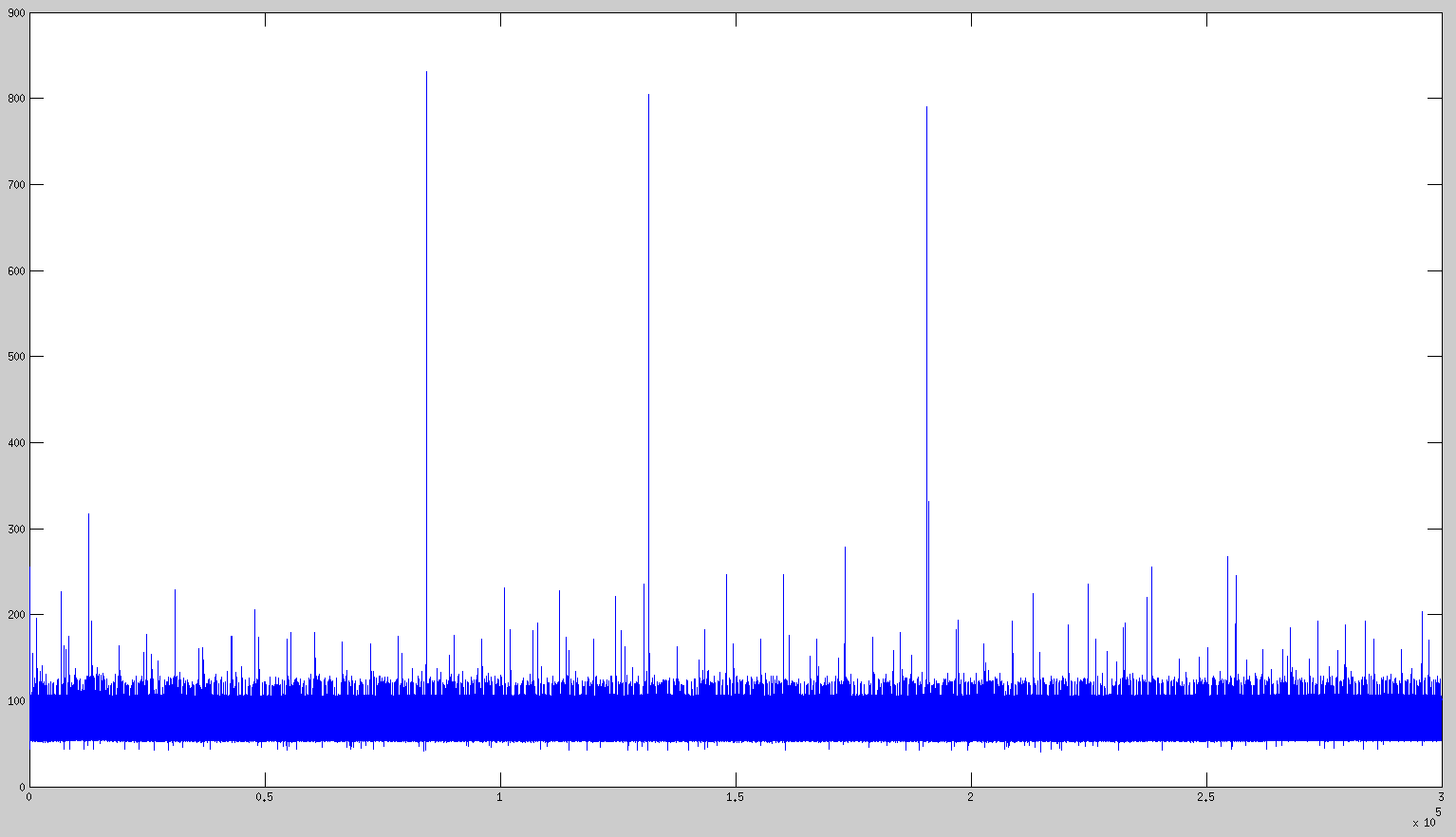
-- Inverse kinematics
Overall time: 24644975 us
Samples: 300000
Min: 40 us
Max: 831 us
Avg: 82 us
The zeros in results for x86 are due to rounding.
These test were done to get a rough idea on timing/latencies distribution for real-time control. I also have somewhere the data for Xilinx Zynq with Xenomai patched kernel, so if you are interested I will try to find it.
Here is also timing distribution for IK on Zynq without Xenomai:
| | 2 | No.2 Revision |
OpenRave is not being actively developed anymore, as far as I know. The latest release is 0.8.2 which is 3 years old. Nevertheless, official Wiki on IKFast states:
The closed-form code generated by ikfast can produce solutions on the order of ~4 microseconds! As a comparison, most numerical solutions are on the order of 10 milliseconds (assuming good convergence).
Also, I have done some tests about a year ago both on x86 (Intel i7 with, 4 cores + HT) and on ARM (Xilinix (Xilinx Zynq 4000, 2 cores). Kinematics model is a typical 6-DOF KUKA and IKFast solver is Transform6D. So the figures were as follows:
x86
-- Forward kinematics
Overall time: 54570 us
Samples: 300000
Min: 0 us
Max: 72 us
Avg: 0 us
-- Inverse kinematics
Overall time: 3146303 us
Samples: 300000
Min: 2 us
Max: 78 us
Avg: 10 us
Xilinx Zynq:
-- Forward kinematics
Overall time: 1152121 us
Samples: 300000
Min: 3 us
Max: 93 us
Avg: 3 us
-- Inverse kinematics
Overall time: 24644975 us
Samples: 300000
Min: 40 us
Max: 831 us
Avg: 82 us
The zeros in results for x86 are due to rounding.
These test were done to get a rough idea on timing/latencies distribution for real-time control. I also have somewhere the data for Xilinx Zynq with Xenomai patched kernel, so if you are interested I will try to find it.
Here is also timing distribution for IK on Zynq without Xenomai:
| | 3 | No.3 Revision |
OpenRave is not being actively developed anymore, as far as I know. The latest release is 0.8.2 which is 3 years old. Nevertheless, official Wiki on IKFast states:
The closed-form code generated by ikfast can produce solutions on the order of ~4 microseconds! As a comparison, most numerical solutions are on the order of 10 milliseconds (assuming good convergence).
Also, I have done some tests about a year ago both on x86 (Intel i7 with, i7, 4 cores + HT) and on ARM (Xilinx Zynq 4000, 2 cores). Kinematics model is a typical 6-DOF KUKA and IKFast solver is Transform6D. So the figures were as follows:
x86
-- Forward kinematics
Overall time: 54570 us
Samples: 300000
Min: 0 us
Max: 72 us
Avg: 0 us
-- Inverse kinematics
Overall time: 3146303 us
Samples: 300000
Min: 2 us
Max: 78 us
Avg: 10 us
Xilinx Zynq:
-- Forward kinematics
Overall time: 1152121 us
Samples: 300000
Min: 3 us
Max: 93 us
Avg: 3 us
-- Inverse kinematics
Overall time: 24644975 us
Samples: 300000
Min: 40 us
Max: 831 us
Avg: 82 us
The zeros in results for x86 are due to rounding.
These test were done to get a rough idea on timing/latencies distribution for real-time control. I also have somewhere the data for Xilinx Zynq with Xenomai patched kernel, so if you are interested I will try to find it.
Here is also timing distribution for IK on Zynq without Xenomai:
| | 4 | No.4 Revision |
OpenRave is not being actively developed anymore, as far as I know. The latest release is 0.8.2 which is 3 years old. Nevertheless, official Wiki on IKFast states:
The closed-form code generated by ikfast can produce solutions on the order of ~4 microseconds! As a comparison, most numerical solutions are on the order of 10 milliseconds (assuming good convergence).
Also, I have done some tests about a year ago both on x86 (Intel i7, 4 cores + HT) and on ARM (Xilinx Zynq 4000, 7000, 2 cores). Kinematics model is a typical 6-DOF KUKA and IKFast solver is Transform6D. So the figures were as follows:
x86
-- Forward kinematics
Overall time: 54570 us
Samples: 300000
Min: 0 us
Max: 72 us
Avg: 0 us
-- Inverse kinematics
Overall time: 3146303 us
Samples: 300000
Min: 2 us
Max: 78 us
Avg: 10 us
Xilinx Zynq:
-- Forward kinematics
Overall time: 1152121 us
Samples: 300000
Min: 3 us
Max: 93 us
Avg: 3 us
-- Inverse kinematics
Overall time: 24644975 us
Samples: 300000
Min: 40 us
Max: 831 us
Avg: 82 us
The zeros in results for x86 are due to rounding.
These test were done to get a rough idea on timing/latencies distribution for real-time control. I also have somewhere the data for Xilinx Zynq with Xenomai patched kernel, so if you are interested I will try to find it.
Here is also timing distribution for IK on Zynq without Xenomai:
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
