
Unable to see topic published from subprocess
I'm trying to use subprocesses spawned by a rospy node to provide information about topics in a distributed fashion, but am unable to see any messages published by the subprocess. The following is a short piece of code that can be used to illustrate the problem:
#!/usr/bin/env python
import rospy
import sys
from std_msgs.msg import String
from multiprocessing import Process
from threading import Thread
def talker():
pub = rospy.Publisher('chatter', String, queue_size=10)
rate = rospy.Rate(10)
while not rospy.is_shutdown():
hello_str = "hello world %s" % rospy.get_time()
rospy.loginfo(hello_str)
pub.publish(hello_str)
rate.sleep()
def talkerprocess():
pub = rospy.Publisher('process', String, queue_size=10)
rospy.init_node('process', anonymous=True)
t1 = Process(target=talker)
t1.start()
while not rospy.is_shutdown():
rate = rospy.Rate(10)
pub.publish("process string %s" % rospy.get_time())
rate.sleep()
def talkerthread():
pub = rospy.Publisher('thread', String, queue_size=10)
rospy.init_node('thread', anonymous=True)
t1 = Thread(target=talker)
t1.start()
while not rospy.is_shutdown():
rate = rospy.Rate(10)
pub.publish("thread string %s" % rospy.get_time())
rate.sleep()
if __name__ == '__main__':
args = rospy.myargv(argv=sys.argv)
try:
if (len(args) < 2):
method = 'process'
else:
method = args[1]
if (method == 'process'):
print("Publishing hello world from subprocess.")
talkerprocess()
elif (method == 'thread'):
print("Publishing hello world from thread.")
talkerthread()
else:
print("Unknown method %s." % method)
except rospy.ROSInterruptException:
pass
Running this node using rosrun [package] [filename] thread will run the talker function in a thread, while passing process as an argument instead will spawn a subprocess using the multiprocessing module. In the first case, using rostopic echo /chatter and rostopic echo /thread will show the messages from both the spawned thread and the original thread. However, if we spawn a subprocess instead, we do not see the messages on /chatter published from the subprocess, while the messages on the /process topic are visible.
I've looked at the logs from a run of the node when spawning a subprocess. The chatter topic never seems to be registered, but this is the same for when running with a spawned thread instead. In both cases the topic is visible using rostopic list, but messages are only received when spawning threads.
edit: I think this is probably because things are running in a different thread/process, so they don't go into the log, but I can't find them elsewhere in the log directory either.
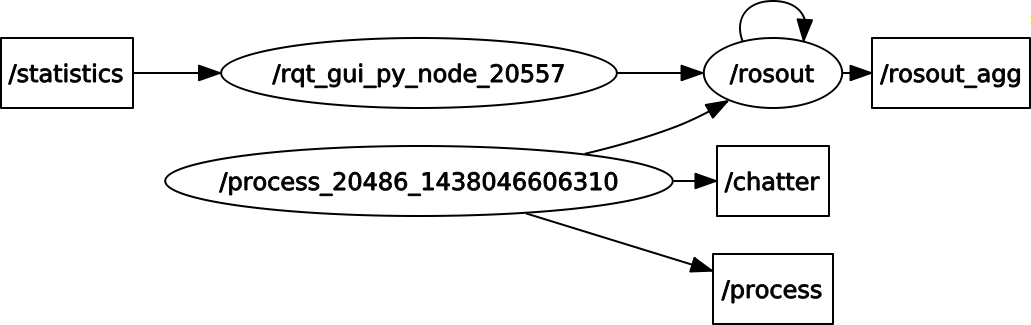
Here's the rqt_graph of the program. The main process is 20486, and the spawned process, 20504, is nowhere to be seen.
Is this behaviour intentional, or is this a bug? Is the mechanism between publishing and subscribing somehow based on process IDs?
