
Ros + openstreetmap (osm cartography package)
Hi,
Is anyone knows how to work with ROS and Open Street Map ? I have ROS indigo.
The package is here: http://wiki.ros.org/osm_cartography
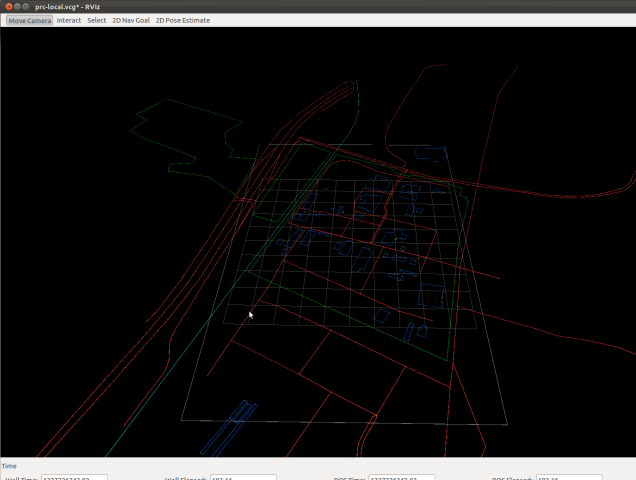
I would like to have something like on this picture:
My code for now is the following but doesn't work:
int main(int argc, char **argv)
{
ros::init(argc, argv, "osm");
ros::NodeHandle n;
ros::ServiceClient client = n.serviceClient<geographic_msgs::GetGeographicMap>("geographic_msgs");
geographic_msgs::GetGeographicMap srv;
srv.request.url = "package://home/user/map.osm";
if(client.call(srv))
{
ROS_INFO("connected");
}
else
{
ROS_ERROR("failed");
}
return 0;
}
Thanks you so much in advance.

after lunching the file, it does not show any picture. Should I run RViz and then what should add in Rviz?