
4-wheel robot localization in global
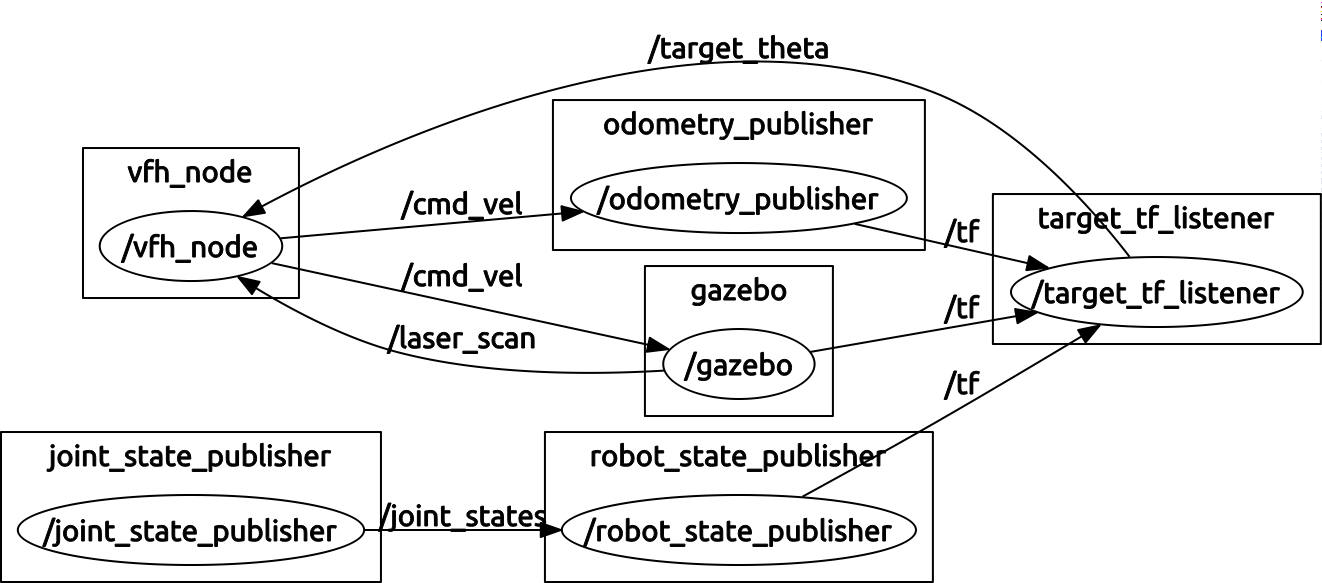 I have odometry_publish node to subscribe velocity from vfh_node with cmd_vel topic; publish the tf between robot between global original point;
I have odometry_publish node to subscribe velocity from vfh_node with cmd_vel topic; publish the tf between robot between global original point;
And target_tf_node subscribe tf from odometry_publish node to compute target position into robot's frame and publish target position(robot frame) with topic target_theta.
---------this step is localization, because get tf to know where the robot in global frame so that transform target into robot frame.
vfh_node subscribe target position from target_tf_node and obstacle information from laser sensor node, manipulate those data to determine a velocity publish through cmd_vel topic which drive the robot in gazebo.
I just want to know is that idea ok? or just tf information is not enough for localization and lead to big error in robot's location.
