
How to calibrate libgazebo imu or any other imu for slam?
Hi, I found the service from the imu (/default/imu) which is a std_srv/empty service. Is it just calling and turning the robot or what do I have to do?
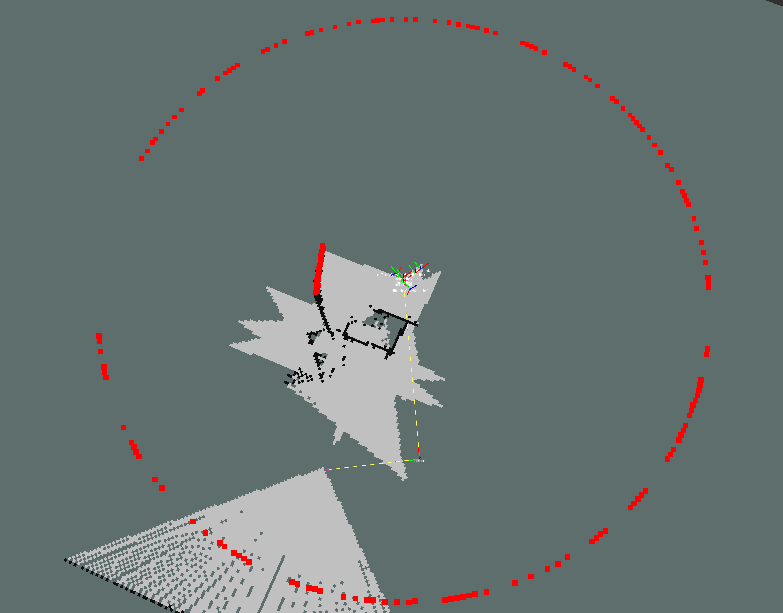
I already searched and did not find any nice tutorial on google about how to do imu calibration in ROS. I also can't find the github libgazebo_plugins repo on google somehow (I think this is really weired, but I know it is there so I can find it) So I guess I might be missing something about the imu too. Can you give me a hint what to do and how? Because the simulated Gyro is somewhat off and slam is working only when driving forward and backward, but looks totally ugly when turning.
Actually the world is containing just a standard cube from Gazebo. That's what it looks when I drive around it.
The IMU is placed in the center between the wheels on the axis. (Diff drive) I am also using robot_localization ukf to fuse the IMU and the Odometry.
Thanks in advance.

