
Problems in path planning and amcl

I am using gazebo to simulate a SummitXL.
The mission is to explore an area. To do that I have developed an algorithm that generates points equally distributed around the area. I use these points as goals for path planning algorithm.
Ii is not working properly:
First of all, in the AMCL, it obtains a great estimation but when the robot continues its movement, the AMCL gets a worse estimation because all the particles are too close.
The most important issue is explained here: When the robot is in a corridor it cannot go through it because it thinks it is closed. I think that this is happening due to the amcl. The robot has the local map with an obstacle (dark grey in the picture) and the global map with a false obstacle (light grey in the picture)
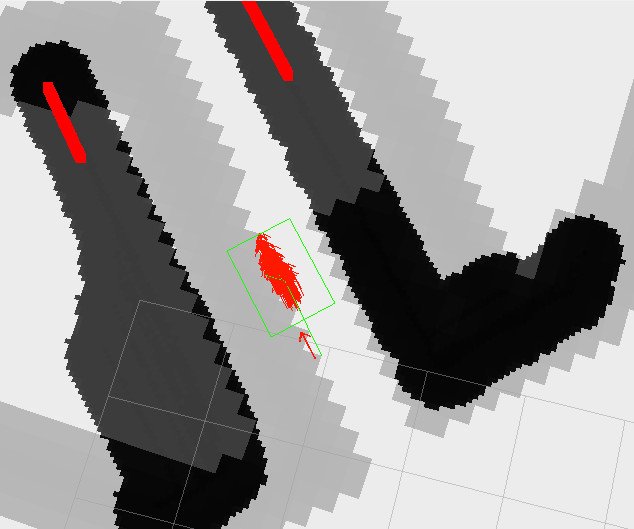
The global map is wrong and it should be une meter away, to coincide with the local map.
If you can help me I would appreciate it. I can give more data if you want.
I will be updating the question as long as I know more important facts about what is happening.

you may wish to post your amcl config file and map.yaml. Did you use gmapping to generate the initial map? Are you using the caret planner?