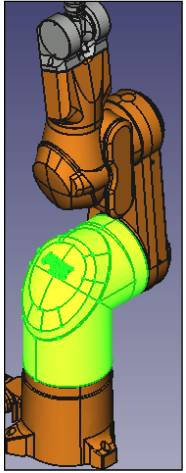
This would appear to be an incorrectly specified center of rotation (origin) for the joint between link_1 and link_2, judging from the screenshot. Are you sure you defined their locations (and orientations) correctly?
Edit:
when I delete all directories and files except rx160.urdf and meshes; it still wokring ! How can you explain that !
If by 'is still working' you mean you can still visualise the model, then that is not really hard to explain: all you need for that are the urdf and the meshes. All the other files in the package are just for documentation, packaging and convenience (the test_rx160.launch file fi).
and in the urdf we can't do lot of things !
I don't really understand what you're trying to say.
The urdf is just a textual description of the kinematic structure of your robot. In the case of the staubli_rx160_support package, this is based on the dimensions of the physical RX 160 from Stäubli.
All you need to do is update the urdf with the information for your particular robot model, and make sure you create some meshes that match it. As Stäubli provides 3D models of their manipulators on their website, this should not be too difficult (but watch the origins and orientations of your links).
If you are not familiar with urdf, you might want to take a look at urdf/Tutorials. If you are, perhaps Create a URDF for an Industrial Robot could provide you some more insight into how that knowledge was used to create the staubli_rx160_support package.

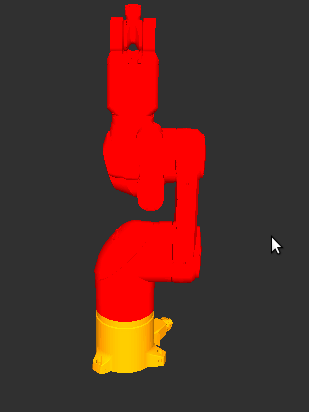
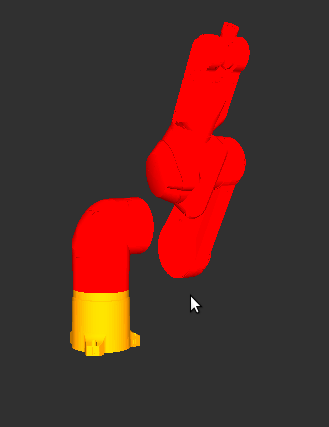

As the author of the staubli packages in the repository you link, I'm quite sure that the model you show in your screenshot is not part of that repository. You should probably clarify that in your question.
Yes gvdhoorn You're right. I was thinking about that when writing the question but I figure that it'll complicate the question !! So as you are the author; where the center rotation is defined or how can I solve that problem ?
Also: this is not really MoveIt related, but is a simple matter of modelling your robot correctly using urdf / xacro. I'd suggest updating your question title (and tags) to reflect this.
I changed the title