
What does the Fixed Frame mean in rviz?
What does the Fixed Frame mean in rviz?
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
What does the Fixed Frame mean in rviz?
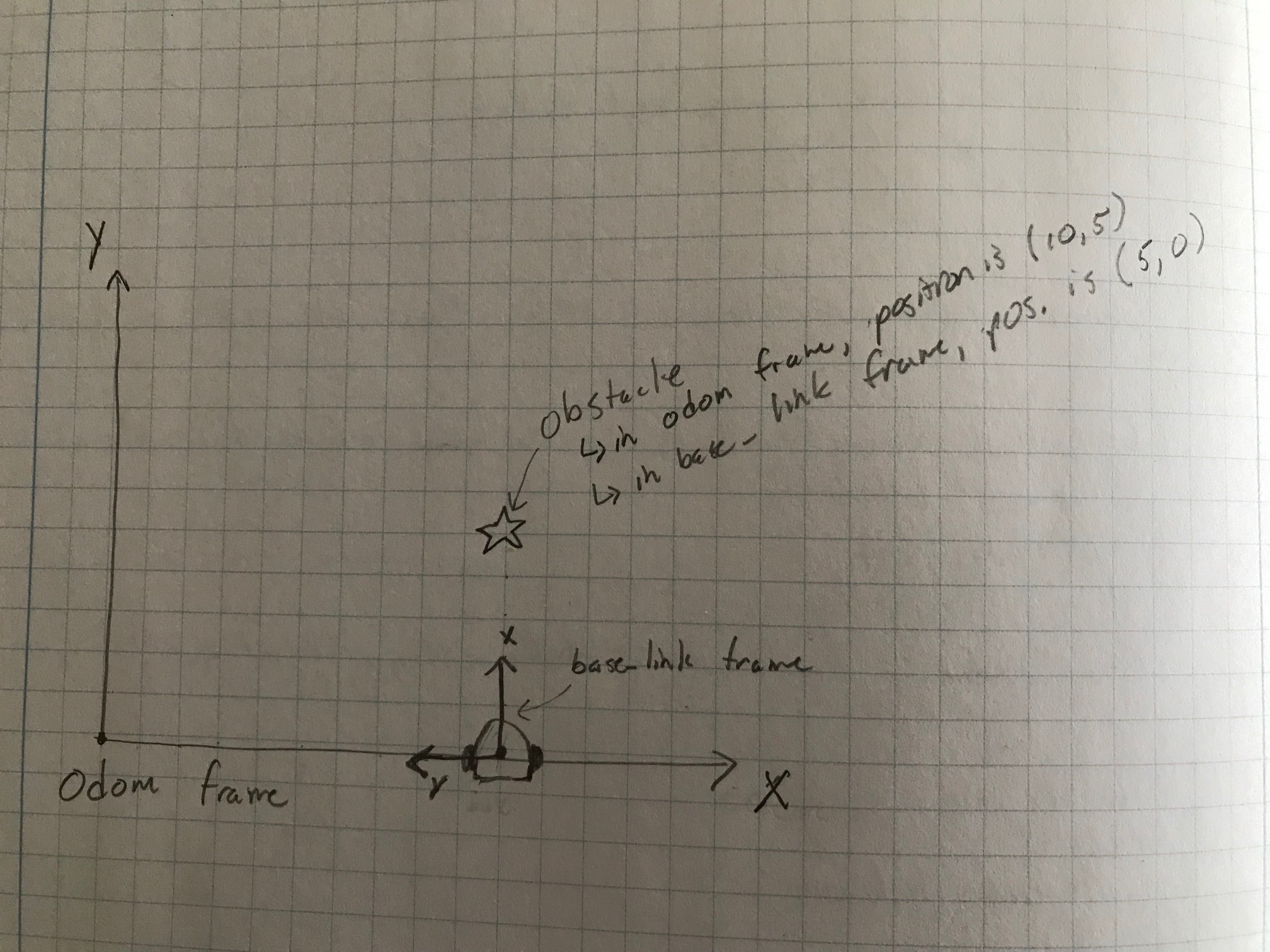
It's the tf frame that all positions/measurements that you see are relative to. For example, let's say you have a robot that has two frames, odom (a world-fixed frame) and base_link (the body frame of the robot). The robot is at position (10, 0) with a heading of pi/2 in the odom frame, and it has a LIDAR on board that sees an obstacle 5 meters directly in front of it. If you set your Fixed Frame to odom, that obstacle will appear at position (10, 5). If you set your Fixed Frame to base_link, it will appear at (5, 0).
EDIT: updating answer for comment from @malharjajoo
Thank you so much.
Does the Grid always be the world coordinate? If I set /odom as the fixed frame. Rviz will draw obstacle at potions (10, 5) in the Grid?
I think the heading in your assumption should be pi/2.
@tom, I didn;t really follow your explanation, what does heading = pi/2 mean ( is the robot facing left by 90 degree compared to lidar) ?
also could you elaborate how the (10,0) and (10,5) works out ? can't seem to visualize that based on the explanation.
Asked: 2014-11-19 06:59:24 -0600
Seen: 7,581 times
Last updated: Feb 19 '18
Fixed Frame [/laser] does not exist
How to visualize surface normals as Marker::Arrow for each point in rviz?
Corrected Odometry from GMapping / Karto?
Visualizing continuous and revolute joint types in rviz
How to add Kinect sensor input to a URDF model?
Has there been progress for URDF transform jitter in RVIZ?
Starting rviz, failed to initialize ogre, cannot find RenderSystem_GL.so
rviz installation issues on 64bit snow-leopard using ROS Diamondback
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
