
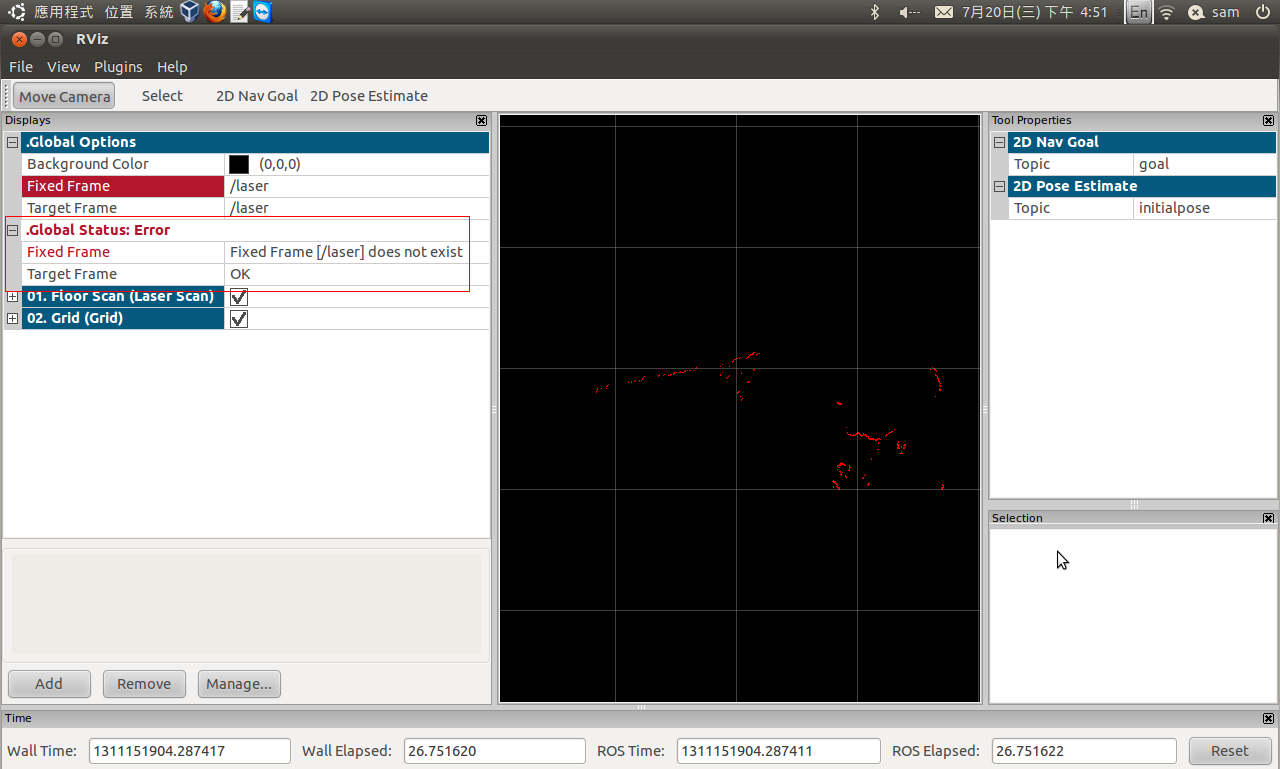
Fixed Frame [/laser] does not exist
my launch file
<launch>
<node pkg="hokuyo_node" type="hokuyo_node" name="hokuyo_node">
<remap from="/scan" to="/base_scan" />
</node>
</launch>
Why rviz says Fixed Frame [/laser] does not exist?
add a comment

