
Using gmapping generated map on Stage
Hi, I searched for a guide on how to use a map generated with gmapping on Stage but couldn't find anything (weird). I generated a map with a real robot using gmapping and as result I got a pgm file and a yaml file. Here's the output of the yaml
image: basketRX.pgm
resolution: 0.050000
origin: [-39.400000, -36.200000, 0.000000]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196
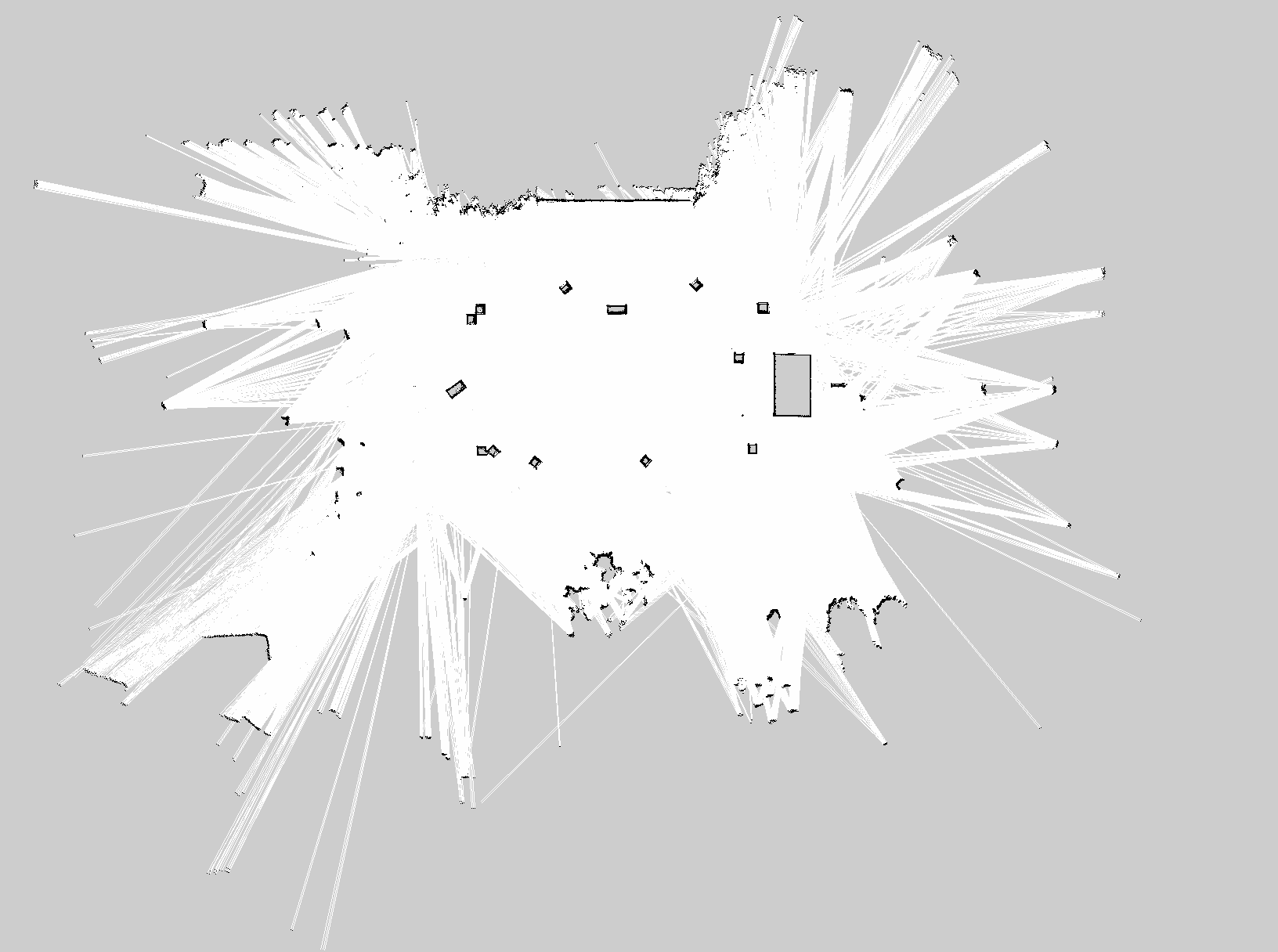
And this is the generated 1632x1216 map (i converted it to png)
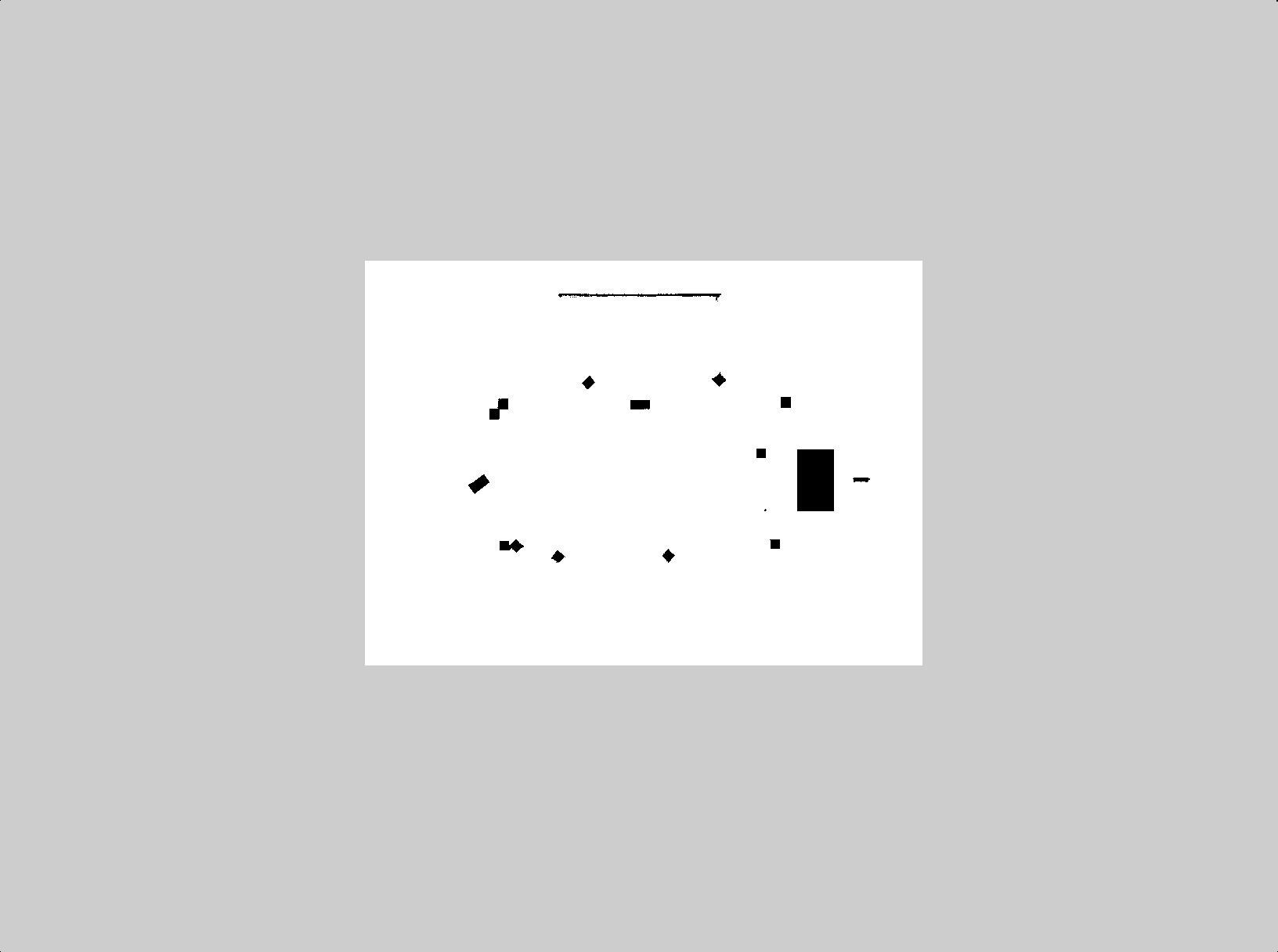
I want to use this map with stage so I modified it a bit (to include just the centre of the map and I repassed the obstacles with GIMP) and wrote a .world file. Unfortunately it seems that the robot cannot localize and navigate badly. Using the same navigation and amcl config file with a different map everything works as it should. So it must be something wrong in the world file I wrote.
The modified map is the following:
While the world file I wrote is this:
include "../Common/Erratic.inc"
include "../Common/Landmarks.inc"
include "../Common/Urg.inc"
# set the resolution of the underlying raytrace model in meters
resolution 0.02
# simulation timestep in milliseconds
interval_sim 100
define landfinder fiducial
(
range_min 1.0
range_max 30.0
range_max_id 30.0
fov 270.0
ignore_zloc 0
# model properties
size [ 0.010 0.010 0.010 ]
)
define floorplan model
(
# sombre, sensible, artistic
color "black"
# most maps will need a bounding box
boundary 1
gui_nose 0
gui_grid 0
gui_outline 0
gripper_return 0
fiducial_return 0
range_return 1
)
window
(
size [ 1120 818 ]
center [ -0.652 2.391 ]
rotate [ 0.000 0.000 ]
scale 21.734
#show_grid 1
#show_trailfast 1
)
# load an environment bitmap
floorplan
(
name "map"
bitmap "map.png"
size [78.800 58.713 0.500]
pose [0 0 0 0]
)
define box model
(
size [0.400 0.400 0.500]
gui_nose 0
)
# ROBOTs
erratic(pose [5.000 4.000 0.000 0.000] name "robot_0" color "blue")
erratic(pose [5.000 0.000 0.000 0.000] name "robot_1" color "orange")
erratic(pose [5.000 -4.000 0.000 0.000] name "robot_2" color "green")
Do you see anything wrong?
