
Any idea to implement a generic controller for a Quadcopter?
I m trying right now to implement a quadcopter. I wrote the URDF file for defining the flying robot and it moves using odometry's informations pretty well in Rviz. But here the first problem.
I m using the move_base as a controller to move the quadcopter around but trying to put some goals in the free space (with a predefined height) it is going to move on a planar surface even if in the move_base one could set the robot as holonomic (free to move on all 6 DOF).
My idea was to define one more frame (/frame_footprint) or "the shadow" of the robot the moves always in the plane and let it controlling by move_base pkg which works pretty good (see the following image):
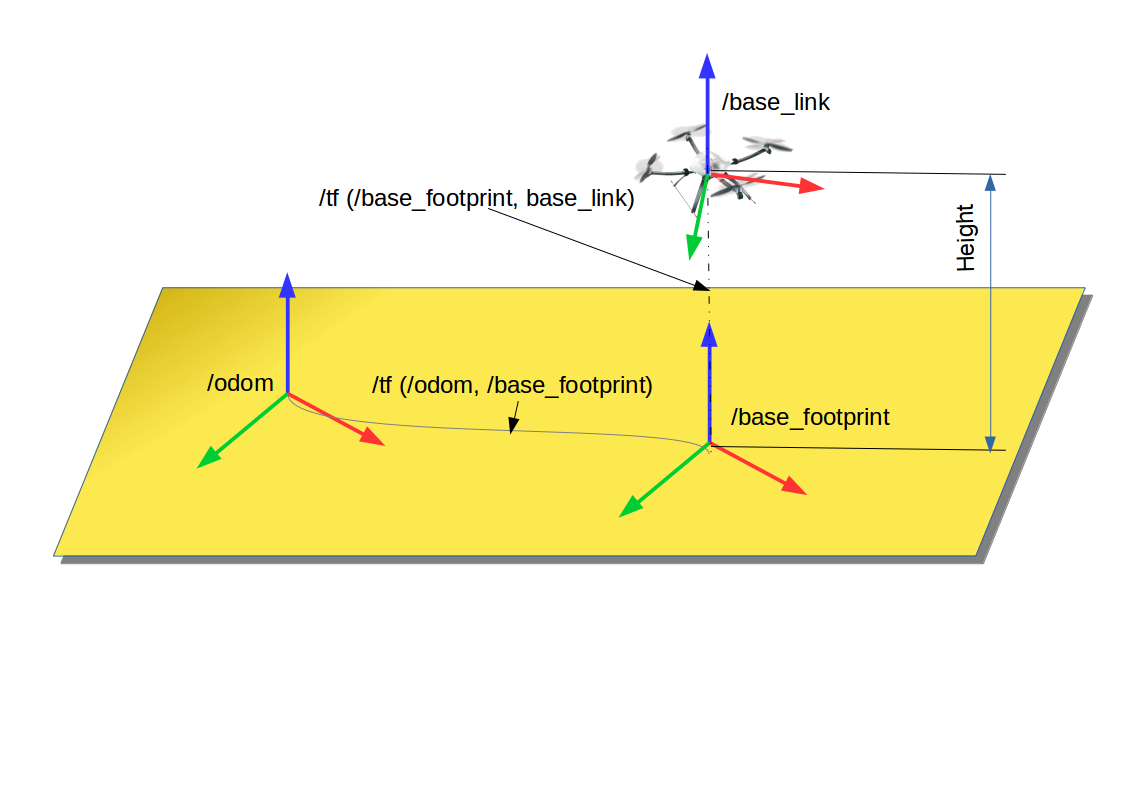
With another transformation I would move the last frame (/frame_link) in respect of /base_footprint. Since it can rotate and move on the z axis it will take as input the height of the copter.
But now I have the first question: How can I control the height? Are there some controller in ROS for a 6DOF flying robot? Any suggestion for a controller?

