
Problems with navigation stack
I have a map of the area, in which I want my differential drive mobile robot to move around to the goals given, for this I already mapped the area with kinect using the gmapping, now I want to use the navigation stack.
I have followed the setup as mentioned in the navigation_stack page http://wiki.ros.org/navigation/Tutori...
But after running the move_base.launch file I get the following errors.
[ WARN] [1408947873.713176792]: Request for map failed; trying again...
[ WARN] [1408947874.215030143]: Request for map failed; trying again...
[ WARN] [1408947874.716821881]: Request for map failed; trying again...
[ WARN] [1408947875.219003710]: Request for map failed; trying again...
[ WARN] [1408947875.721026682]: Request for map failed; trying again...
[ WARN] [1408947876.223351709]: Request for map failed; trying again...
[ WARN] [1408947876.725076883]: Request for map failed; trying again...
[ WARN] [1408947876.920729621]: Waiting on transform from base_link to map to become available before running costmap, tf error:
[ WARN] [1408947877.227117599]: Request for map failed; trying again...
[ WARN] [1408947877.729052070]: Request for map failed; trying again...
[ WARN] [1408947878.230988466]: Request for map failed; trying again...
[ WARN] [1408947878.733617816]: Request for map failed; trying again...
[ WARN] [1408947879.235487601]: Request for map failed; trying again...
[ WARN] [1408947879.738477007]: Request for map failed; trying again...
[ WARN] [1408947880.240812581]: Request for map failed; trying again...
[ WARN] [1408947880.743107807]: Request for map failed; trying again...
[ WARN] [1408947881.245370459]: Request for map failed; trying again...
[ WARN] [1408947881.747222844]: Request for map failed; trying again...
[ WARN] [1408947881.971717380]: Waiting on transform from base_link to map to become available before running costmap, tf error:
[ WARN] [1408947882.249109598]: Request for map failed; trying again...
[ WARN] [1408947882.750964052]: Request for map failed; trying again...
[ WARN] [1408947883.254429857]: Request for map failed; trying again...
[ WARN] [1408947883.756259117]: Request for map failed; trying again...
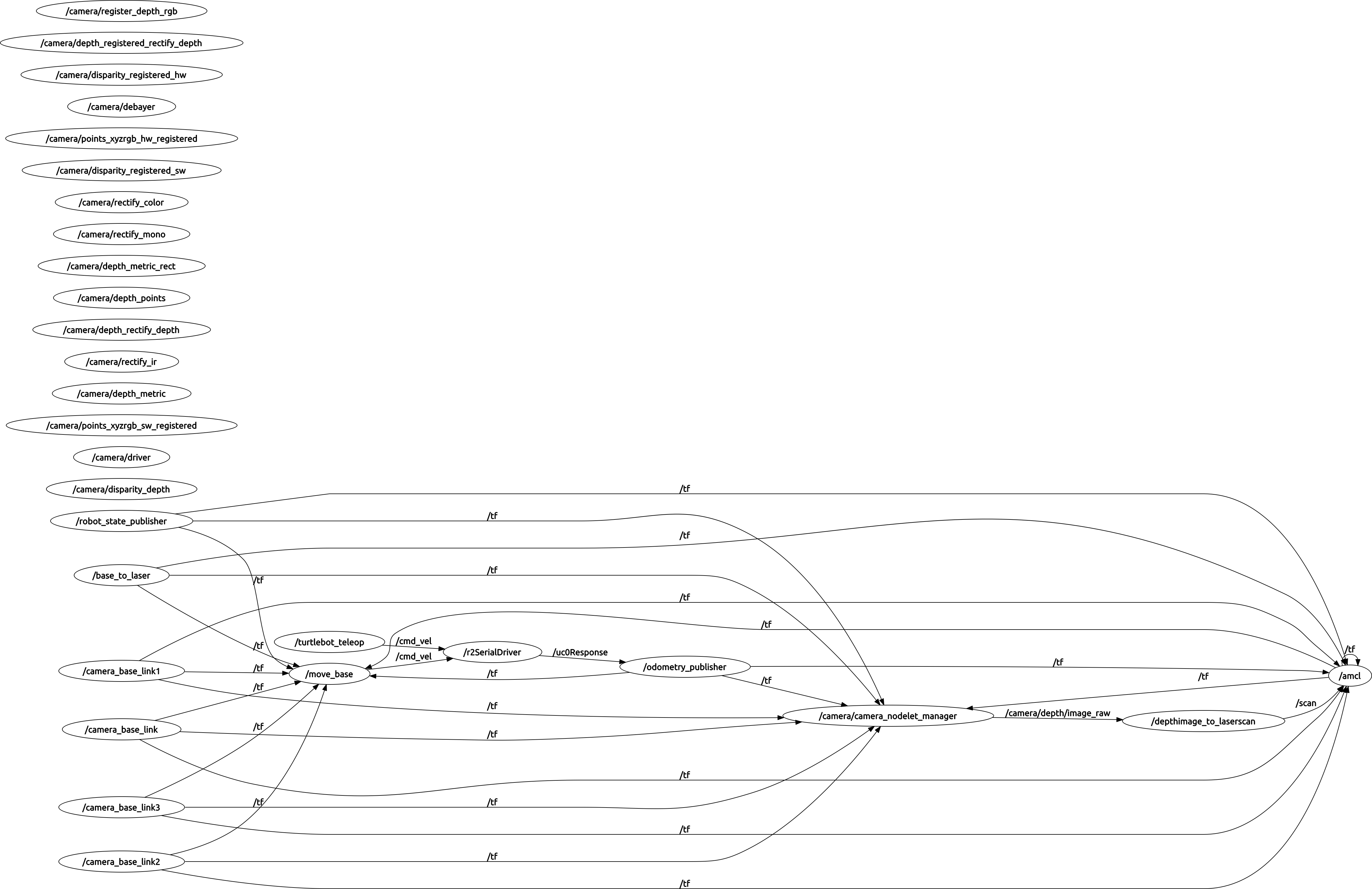
Here is my graph attached:
So What I am missing here, which is stopping the navigation stack to run.
many thanks in advance.
add a comment

