
Camera Calibration Uses Wrong Aspect Ratio from USB Camera
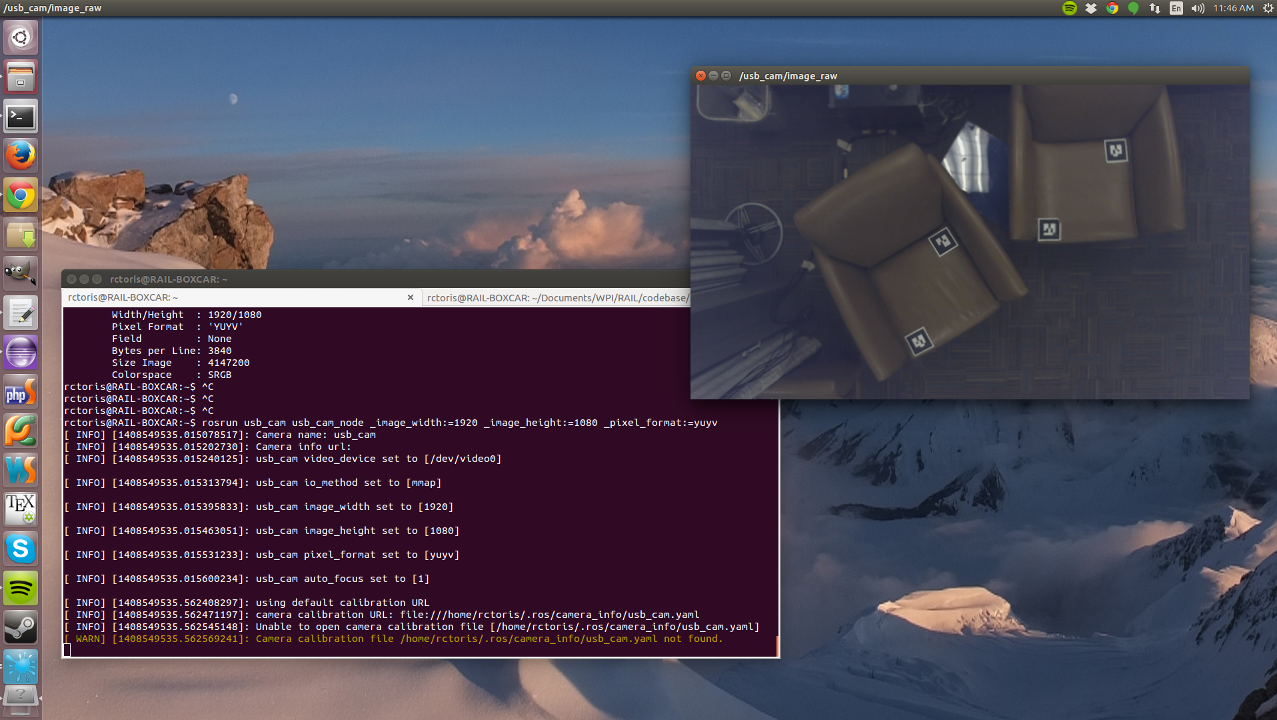
We are trying to calibrate a USB camera running at 1080p (i.e., 1920x1080). When launching usb_cam and then image_view, the image comes up correctly at the right aspect ration.
rosrun usb_cam usb_cam_node _image_width:=1920 _image_height:=1080 _pixel_format:=yuyv rosrun image_view image_view image:=/usb_cam/image_raw
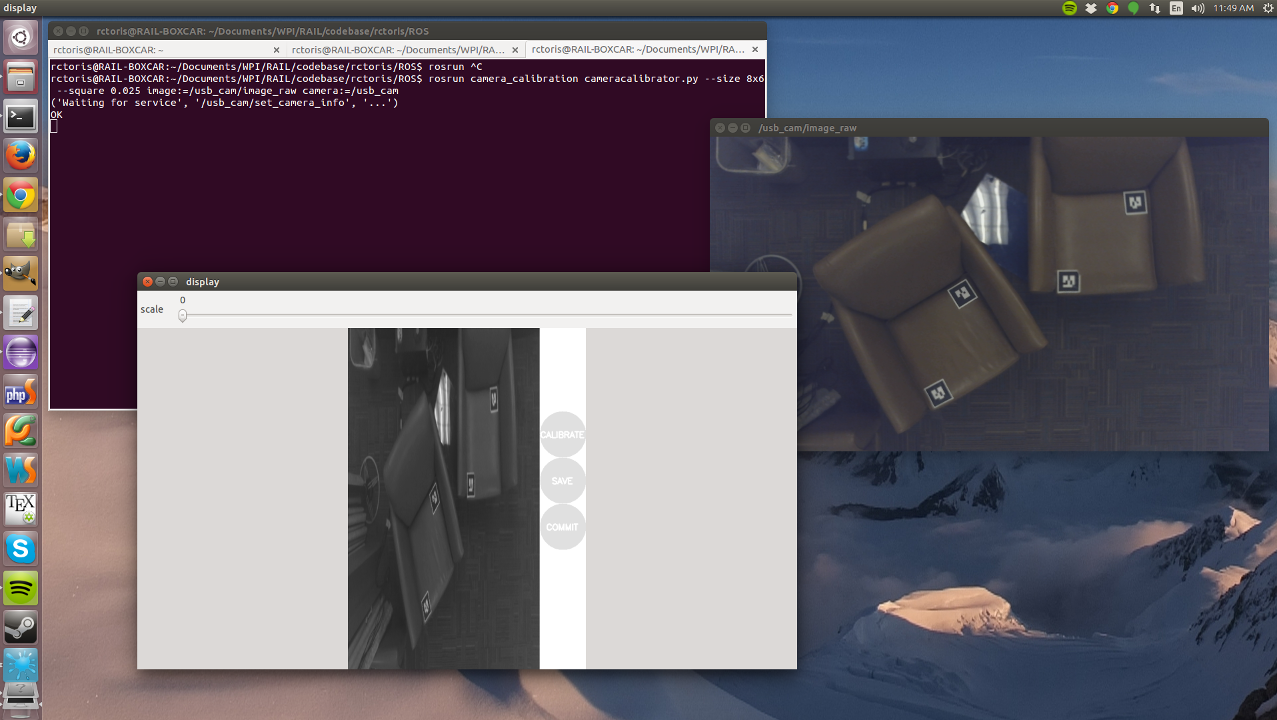
However, whenever we try and run the camera calibration node, the aspect ratio of the image seems to be reversed:
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.025 image:=/usb_cam/image_raw camera:=/usb_cam
We are running Ubuntu 14.04 64bit with the latest Indigo build.

Created a ticket/pull request here for a possible bug:
https://github.com/ros-perception/ima...