
Obstacle doesn't show on rviz [closed]

I face a problem that obstacles doesn't show on rviz. According to some answers, there are some changes from Hydro.
costmap_2d::InflationLayer, costmap_2d::ObstacleLayer and FootprintLayer are added.
When I execute rostopic list, I can look at /local_costmap/obstacles and
local_costmap/inflated_obstacles. But they doesn't publish anything.
So, Could anyone tell me how to show obstacle grid on rviz? Thank you in advance!
If I use a default launch on turtlebot_navigation/tutorial, I can do that.
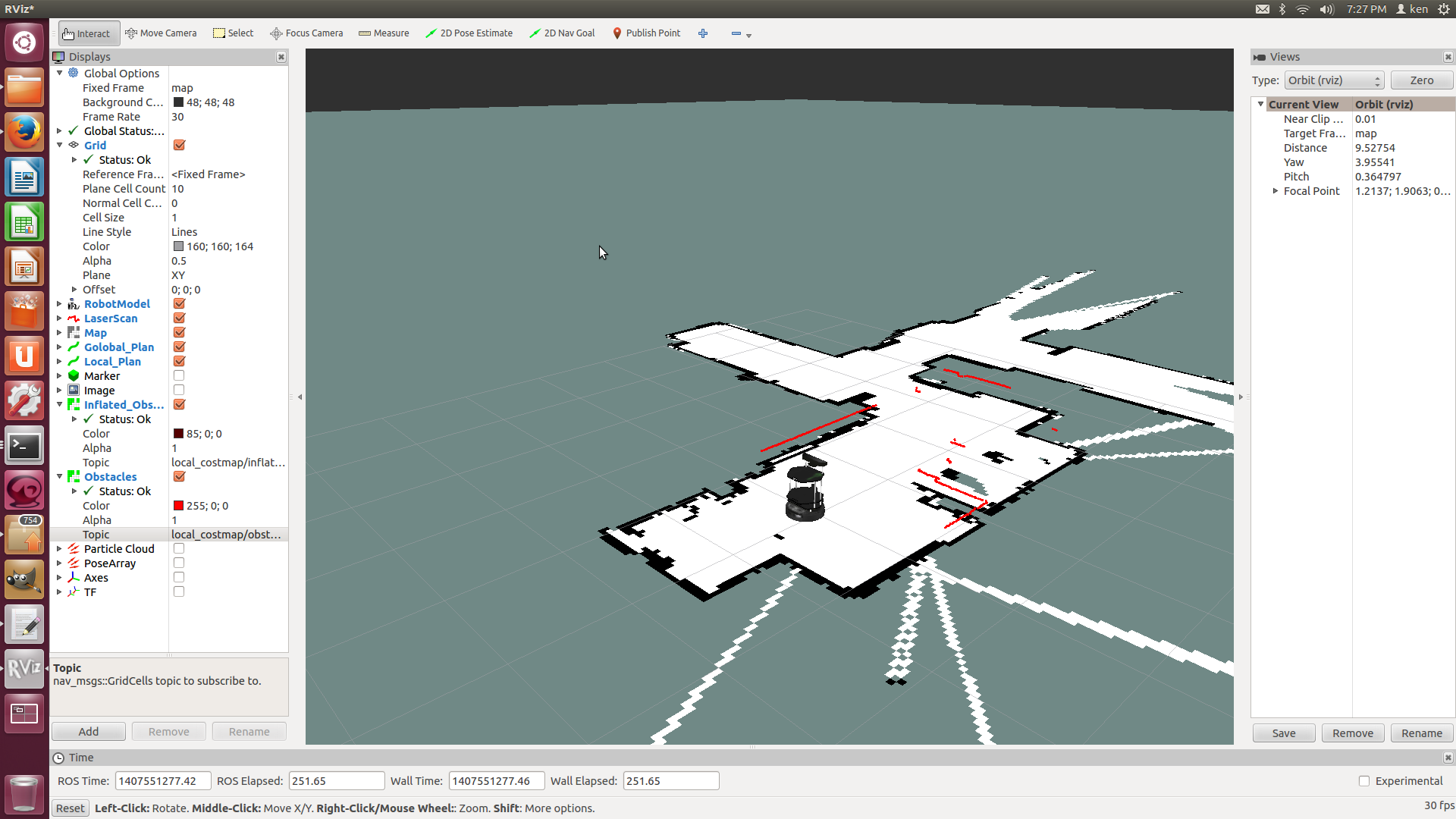
If I perform rosrun rviz rviz instead of roslaunch turtlebot_rviz_launchers view_navigation --screen, I can show next image.

Ken, Are you using the default configuration of the navigation stack explained here : http://wiki.ros.org/navigation/Tutori... ?
If it helps, you can use "rosrun rqt_reconfigure rqt_reconfigure" to dynamically enable/disable the different layers and see the effect.
Thanks @al-dev. Actually, I have changed a configuration of turtlebot. I mean that my turtlebot have kinect on top plate and hokuyo on middle plate. If I follow /turtlebot_navigation/tutorial, I can do that.
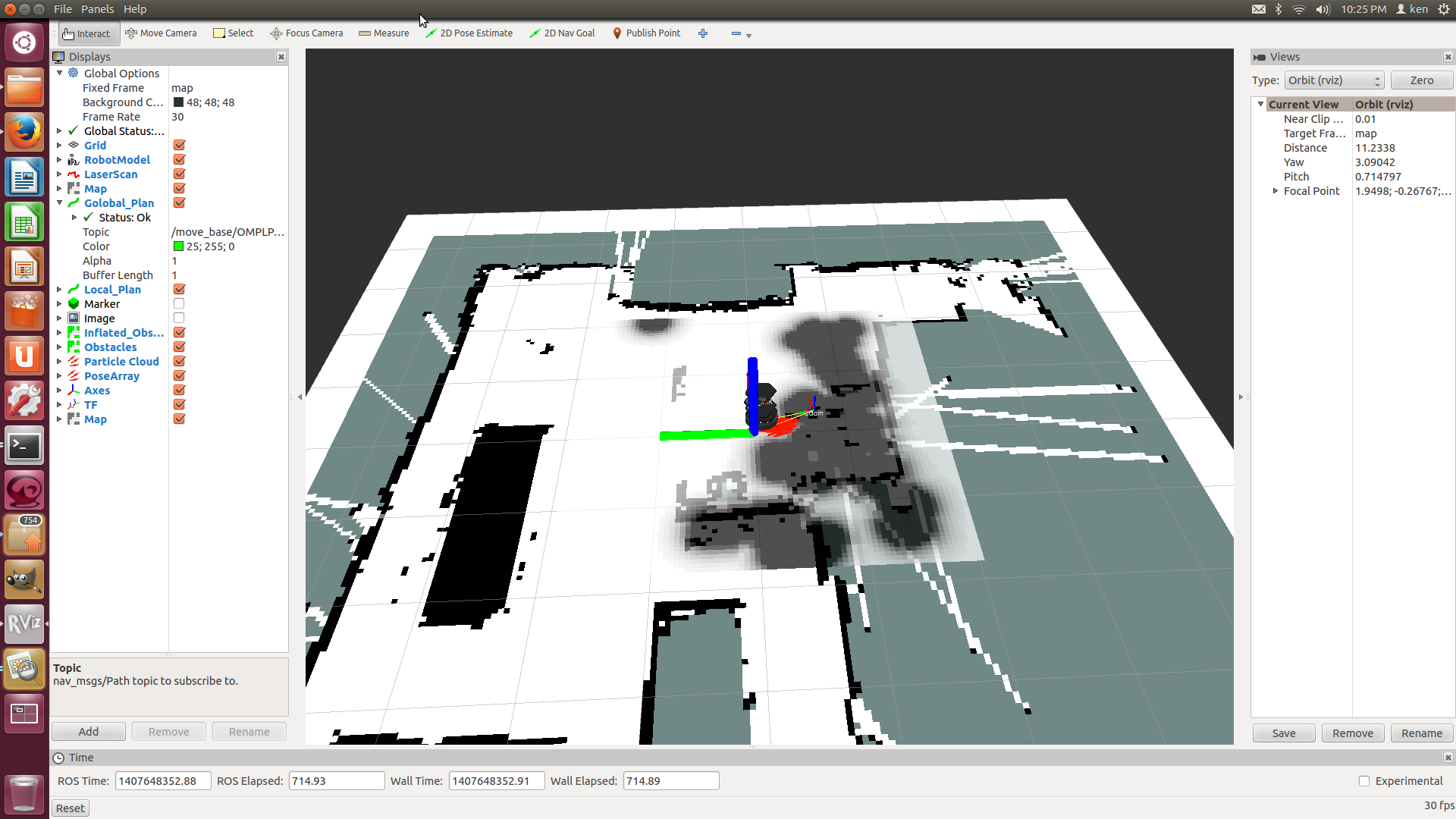
Ken, by "the obstacle" are you referring to that black rectangular shape? If so, have you checked that the "obstacle_range" and "window size" parameters of your costmaps are set to a large enough value? The default should be 2.5m, which is just about the distance to the black shape on the map.
Hi, @al-dev, Practical depth is 3.5m and physical depth is 4.0m in case of kinect? Do you say that you should set obstacle_range 3.5m? By the way, black rectangular is turtlebot2.
hi,I also have the same trouble.Can you tell the reason?Thank you very much