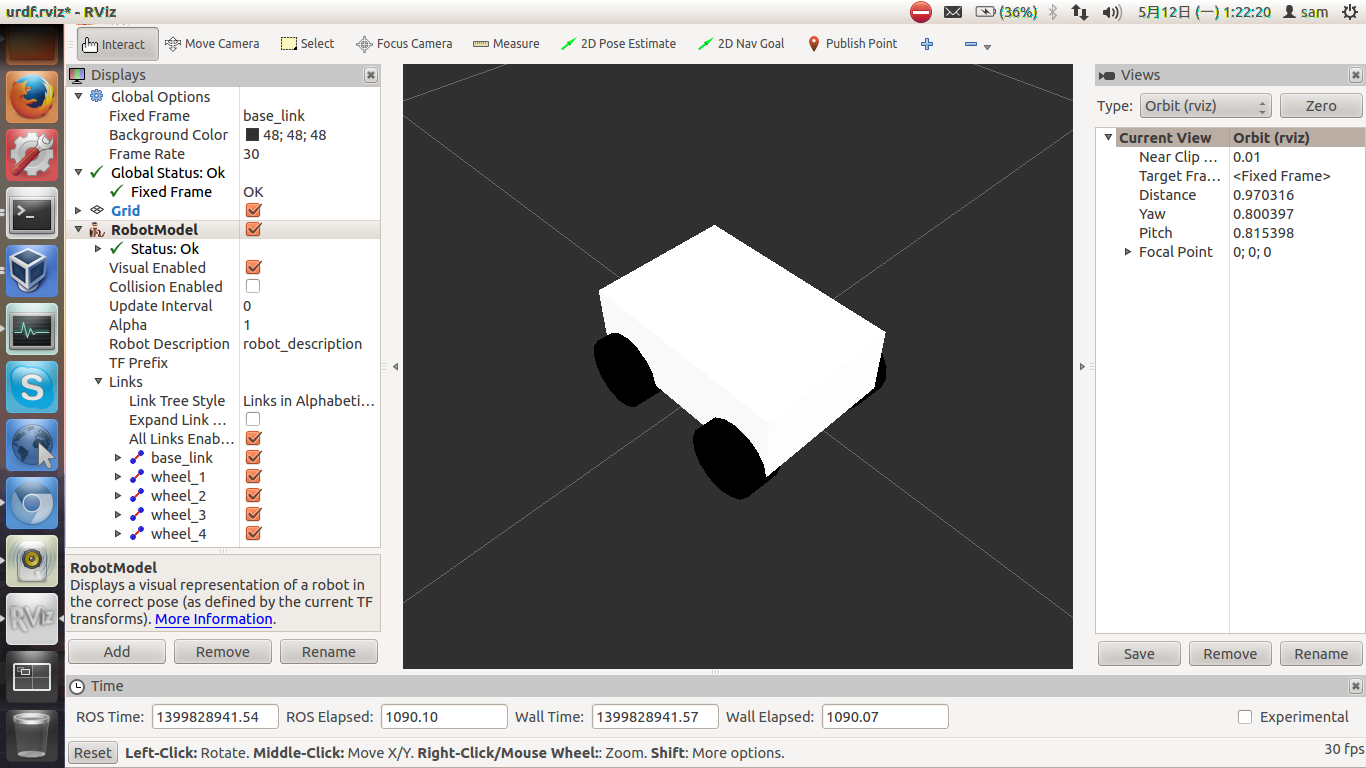
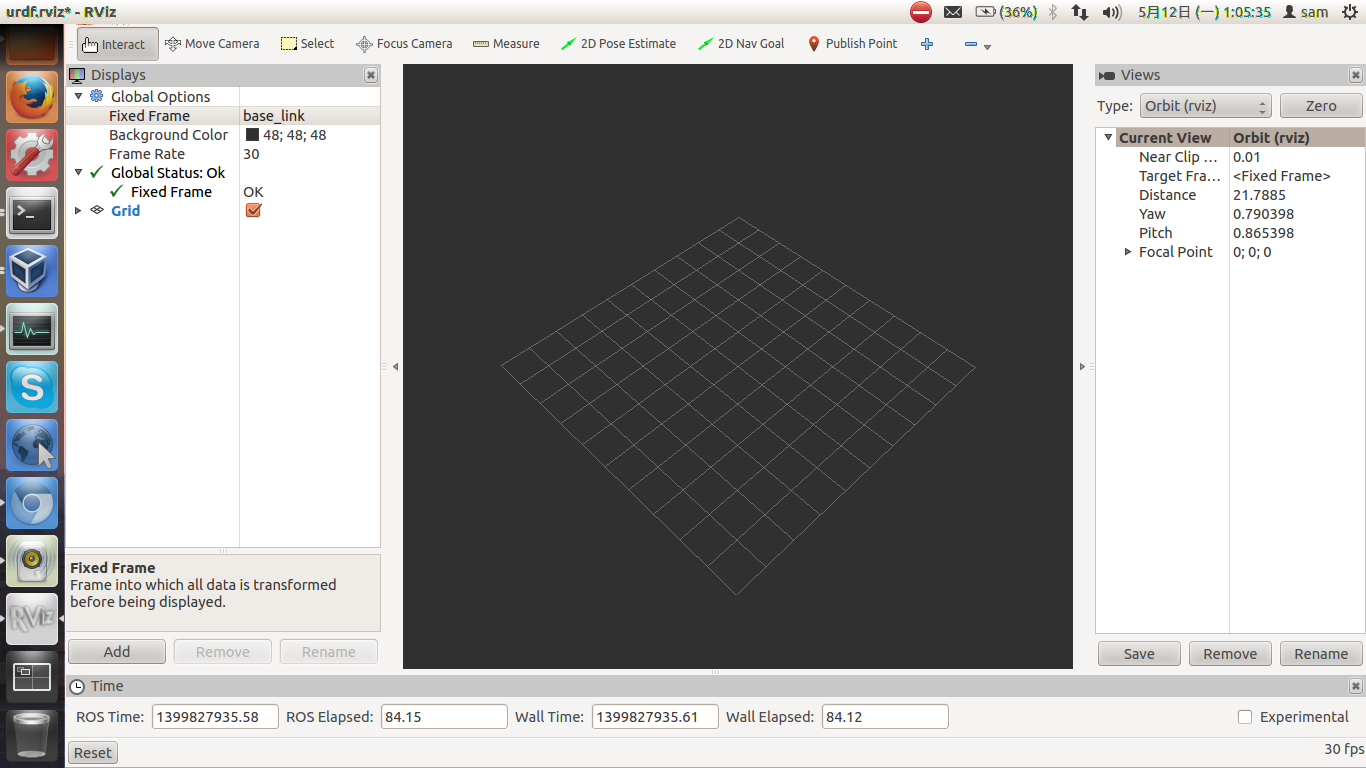
How to visualize URDF model in rviz?
I can detect base_link in rviz, but failed to visualize it.
Here is my process:
catkin_create_pkg sam_load_urdf_into_rviz
cd sam_load_urdf_into_rviz
mkdir urdf
vim urdf/robot1.urdf
<?xml version="1.0"?>
<robot name="Robot1">
<link name="base_link">
<visual>
<geometry>
<box size="0.2 .3 .1"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0.05"/>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
</link>
<link name="wheel_1">
<visual>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<origin rpy="0 1.5 0" xyz="0.1 0.1 0"/>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<link name="wheel_2">
<visual>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<origin rpy="0 1.5 0" xyz="-0.1 0.1 0"/>
<material name="black"/>
</visual>
</link>
<link name="wheel_3">
<visual>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<origin rpy="0 1.5 0" xyz="0.1 -0.1 0"/>
<material name="black"/>
</visual>
</link>
<link name="wheel_4">
<visual>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<origin rpy="0 1.5 0" xyz="-0.1 -0.1 0"/>
<material name="black"/>
</visual>
</link>
<joint name="base_to_wheel1" type="fixed">
<parent link="base_link"/>
<child link="wheel_1"/>
<origin xyz="0 0 0"/>
</joint>
<joint name="base_to_wheel2" type="fixed">
<parent link="base_link"/>
<child link="wheel_2"/>
<origin xyz="0 0 0"/>
</joint>
<joint name="base_to_wheel3" type="fixed">
<parent link="base_link"/>
<child link="wheel_3"/>
<origin xyz="0 0 0"/>
</joint>
<joint name="base_to_wheel4" type="fixed">
<parent link="base_link"/>
<child link="wheel_4"/>
<origin xyz="0 0 0"/>
</joint>
</robot>
mkdir launch
vim launch/load_urdf_into_rviz.launch
<launch>
<arg name="model" />
<arg name="gui" default="False" />
<param name="robot_description" textfile="$(find sam_load_urdf_into_rviz)/urdf/robot1.urdf" />
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find sam_load_urdf_into_rviz)/urdf.rviz" />
</launch>
Then I open new terminal to catkin_make successfully. Then I run:
sam@sam:~/code/ros_hydro_overlay/src/sam_code/sam_load_urdf_into_rviz$ optirun roslaunch sam_load_urdf_into_rviz load_urdf_into_rviz.launch
... logging to /home/sam/.ros/log/4406b7d4-d92e-11e3-afd5-a64105f7a087/roslaunch-sam-12875.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://sam:57964/
SUMMARY
========
PARAMETERS
* /robot_description
* /rosdistro
* /rosversion
* /use_gui
NODES
/
joint_state_publisher (joint_state_publisher/joint_state_publisher)
robot_state_publisher (robot_state_publisher/state_publisher)
rviz (rviz/rviz)
auto-starting new master
process[master]: started with pid [12899]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 4406b7d4-d92e-11e3-afd5-a64105f7a087
process[rosout-1]: started with pid [12912]
started core service [/rosout]
process[joint_state_publisher-2]: started with pid [12924]
process[robot_state_publisher-3]: started with pid [12925]
process[rviz-4]: started with pid [12945]
How to solve it?
Thank you~
add a comment