
Problems Understanding the rxgraph results when using gmapping and navigation [closed]
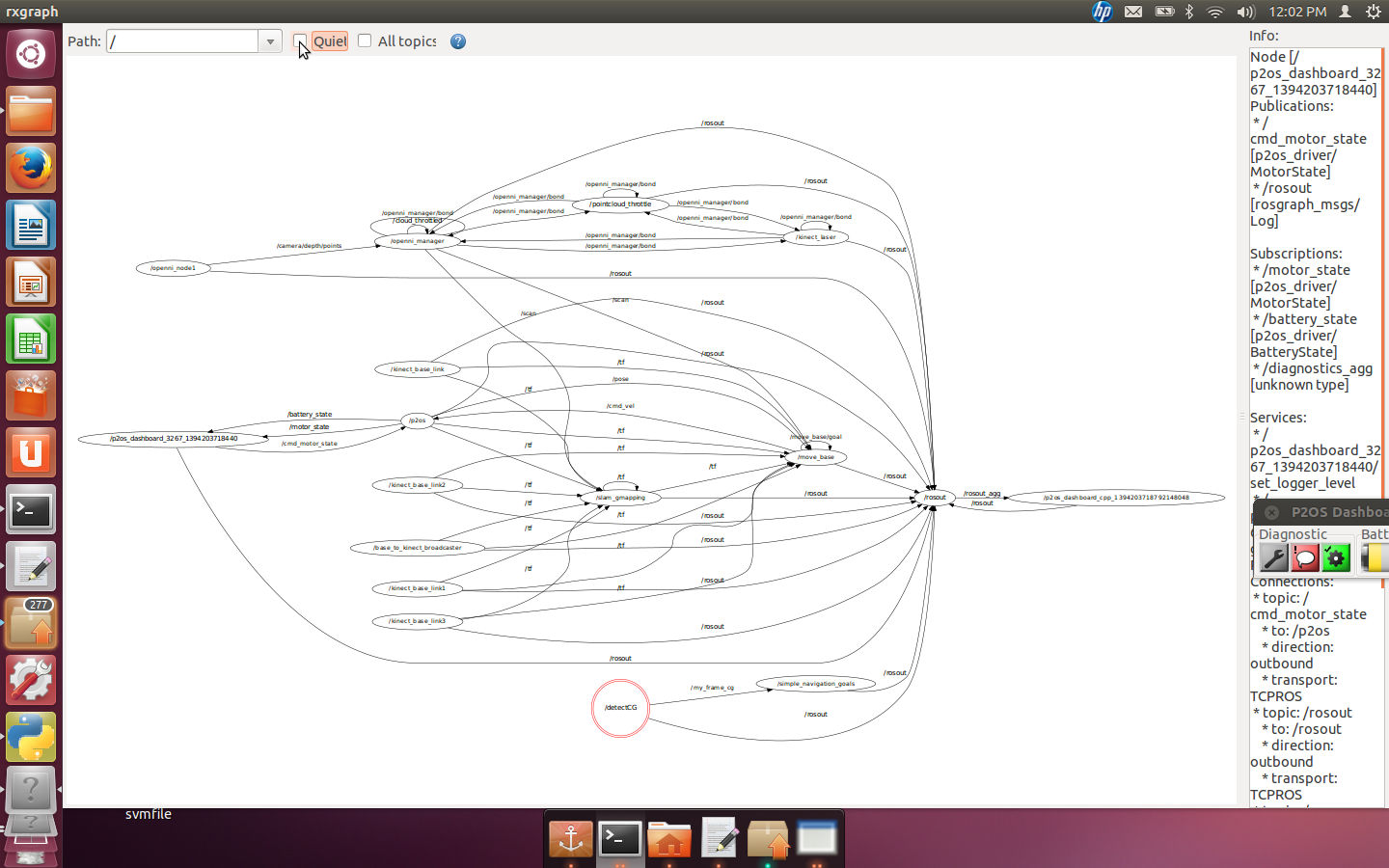
Hi Ive been working on making a pioneer use gmapping and navigation and it has gone well and works, but when i look into the rxgraph some questions rise 1) why is there no /map topic publishing and why is move_base susbscribing to a /tf and not to a /map 2) Why is there so many /kinect_base_link nodes and what do these do? 3) why is there one node in a big double red circle?
I attached the rxgraph so any help would be great thanks
My Llaunch files are test.launch
launch> !-- kinect nodes --> include file="$(find openni_camera_deprecated)/launch/openni_node.launch"/>
!-- openni_manager --> node pkg="nodelet" type="nodelet" name="openni_manager" output="screen" respawn="true" args="manager"/>
!-- throttling --> node pkg="nodelet" type="nodelet" name="pointcloud_throttle" args="load pointcloud_to_laserscan/CloudThrottle openni_manager"> param name="max_rate" value="2"/> remap from="cloud_in" to="/camera/depth/points"/> remap from="cloud_out" to="cloud_throttled"/> /node>
!-- fake laser --> node pkg="nodelet" type="nodelet" name="kinect_laser" args="load pointcloud_to_laserscan/CloudToScan openni_manager"> param name="output_frame_id" value="/openni_depth_frame"/> remap from="cloud" to="cloud_throttled"/> /node> /launch>
move_basecg.launch launch>
#param name="navfn/allow_unknown" value="true"/>
node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen"> remap from="/odom" to="/pose" /> remap from="cmd_vel" to="cmd_vel" />
param name="controller_frequency" value="6.0" />
rosparam file="$(find p2os_launch)/costmap_common_params.yaml" command="load" ns="global_costmap" /> rosparam file="$(find p2os_launch)/costmap_common_params.yaml" command="load" ns="local_costmap" /> rosparam file="$(find p2os_launch)/local_costmap_params.yaml" command="load" /> rosparam file="$(find p2os_launch)/global_costmap_params.yaml" command="load" /> rosparam file="$(find p2os_launch)/base_local_planner_params.yaml" command="load" ns="TrajectoryPlannerROS" />
/node> /launch>
launch_kinect.launch
launch>
!-- Publish tranformation --> !--node pkg="tf" type="static_transform_publisher" name="base_to_kinect_broadcaster" args="0.1905 0.0 0.2659 0 0 0 base_link openni_camera 20" /-->
!-- Start the kinect sensor --> include file="$(find pointcloud_to_laserscan)/launch/test.launch"/>
/launch>
slam_cg.launch
launch>
!-- Publish tranformation --> node pkg="tf" type="static_transform_publisher" name="base_to_kinect_broadcaster" args="0.1905 0.0 0.2659 0 0 0 base_link openni_camera 20" />
!-- Start SLAM --> node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen"> !--remap from="scan" to="base_scan"/--> !--param name="odom_frame" value="odom"/--> param name="map_update_interval" value="2.0"/> param name="maxUrange" value="6.0"/> param name="sigma" value="0.05"/> param name="kernelSize" value="1"/> param name="lstep" value="0.05"/> param name="astep" value="0.05"/> param name="iterations" value="5"/> param name="lsigma" value="0.075"/> param name="ogain" value="3.0"/> param name="lskip" value="0"/> param name="srr" value="0.01"/> param name="srt" value="0.02"/> param name="str" value="0.01"/> param name="stt" value="0.02"/> param name="linearUpdate" value="0.25"/> !-- param name="linearUpdate" value="0.5"/--> param name="angularUpdate" value="0.262"/> !--param name="angularUpdate" value="0.436"/--> param name="temporalUpdate" value="-1.0"/> param name="resampleThreshold" value="0.5"/> param name="particles" value="300"/> param name="xmin" value="-50.0"/> param name="ymin" value="-50.0"/> param name="xmax" value="50.0"/> param name="ymax" value="50.0"/> param name="delta" value="0.05"/> param name="llsamplerange" value="0 ...


{kind=link}