
Why ROS Topic should get XMLRPC address:port but ROS Service doesn't?
I followed ROS Introduction (Radu Bogdan Rusu) in Events/CoTeSys-OS-School.
This is ROS Topic mechanism:

I can see in step 2, Listener get Talker's XML/RPC's address:port.
This is ROS Service mechanism:
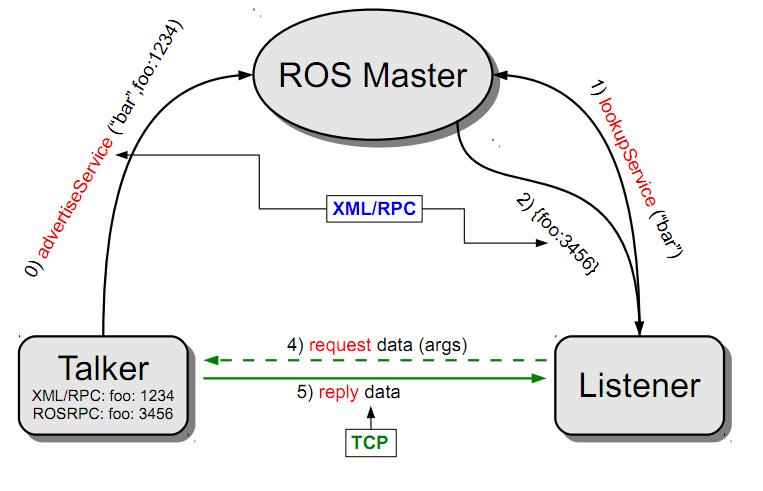
I can see in step 2, Listener get Talker's XML/RPC's data address:port.
My question is why ROS topic should let Listener get its XML/RPC's address:port but ROS Service doesn't?
By the way:
1.what is second picture's step 3? Is step 3 is Listener making a data port connection(foo:3456) to Talker?
2.Is "foo" a IP address?
Thank you~
add a comment

