
Problems related to proper working of navigation stack in ROS
Hi,
I am using USARSim/ROS http://sourceforge.net/projects/usarsimros/ and I am able to move the robot through teleop and generate a map of the environment as well. I am using ROS fuerte with Ubuntu 10.04 with 4GB RAM machine.
Currently, I try to achieve the autonomous navigation using the tutorial http://wiki.ros.org/navigation/Tutorials/RobotSetup. I try to move autonomously in a known map using move_base, amcl and map_server.But, I am facing some trouble in achieving proper autonomous behavior.
- Whenever I set the the goal through rviz window, then robot doesn't go to that particular position instead it rotate for 2-3 seconds and move to other place and continues it's motion like this.
NEW VIDEOS SHOW THREE SCENARIO
VIDEO 1 Showing successful achievement of goals https://www.dropbox.com/s/h275wqxmeyj8ed8/correct%20working.mp4
VIDEO 2 Difficult Goal where robot halts and doesn't go to new goal
https://www.dropbox.com/s/xmsl5clv178hrec/difficult%20goal%20stopped.mp4
VIDEO 3 Planner Error when teleop is also active along with move_base https://www.dropbox.com/s/xxbe6tjhc5lj92w/Planner%20working%20arbitrary.mp4
*Robot doesn't move exactly along with the GLOBAL PLAN line and it do have some rotation while approaching the goal. *
Do you have any idea why it is happening?
Global Plan (Path),Local Plan (Path) and Planner are added in the rviz by going through the tutorial http://wiki.ros.org/navigation/Tutorials/Using%20rviz%20with%20the%20Navigation%20Stack
I have included my detailed question in the following Link. http://pastebin.com/8N6cHnQk
This problem may be due to parameter setting in different configuration files. But can anyone please tell what and where are the files and corresponding parameters that need to be looked into seriously.
Again is this a odometry problem?
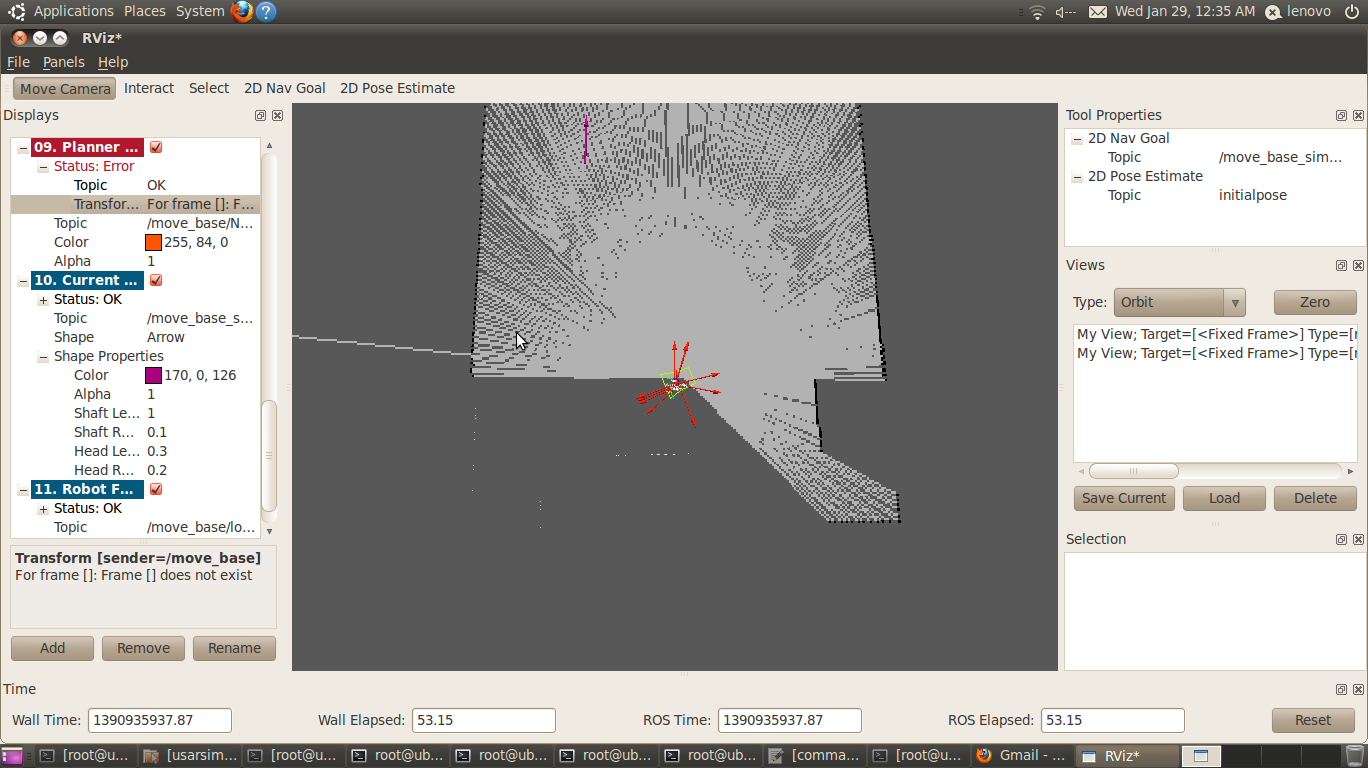
Some screen shots are given which shows that error appear when teleop and autonomous navigation both exist
Thanks for co-operation

Usually rotating in place is a clearing behavior, meaning it can't find a valid path to the goal. To check this, visualize the local costmap (just click "add" in rviz and then "add by type" the local costmap. Let me know what you see with that.
@Tim Sweet, I have included one more video. What I observe is that the global plan works fine, since there is a line joining robot's position to goal position can be seen in the video as well. But, there is no sign that whether local planner works well or not. I have try to include obstacle and static map as well but those things is not visible in my rviz window? The goal position is very easy, since we have set it in front of its starting postion. Why it is taking too much time?
Hi, I finally achieve the goal when I stop teleop after moving around the environment and then launch move_base.launch. But sometimes it shows abnormal behavior as updated in the videos of the question.