Before mapping with the TurtleBot calibration is required. At this point I would suggest upgrading your TurtleBot to electric (http://www.ros.org/wiki/Robots/TurtleBot/electric/Robot%20Upgrade), it will make storing calibration much easier.
Once you upgrade, sudo service turtlebot start will be launching the turtlebot.launch file in /etc/ros/electric. All you need to do is edit this file after calibration and your calibration paramenters will be stored permanently. You shouldn't need to calibrate your TurtleBot very often.
After you calibrate you can make a map. It is important to note that the TurtleBot has difficulty staying localized in large open spaces (anywhere it can not see a wall or furniture with in 2-3 meters). In my home I have a relatively open floor plan and was able to map the 500 sq ft without trouble.
When making a map you need to remember that the algorithm is doing scan matching (trying to match up scans as it moves and checking to see if it's closed the loop). So it is important to be methodical when making a map especially with a TurtleBot since it has poor odometry.
To start when making a map with the TurtleBot, you should drive the perimeter (near walls and furniture) of a room several times in one direction at an average pace (don't go too slow, the TurtleBot odometry is the worst when driving slow). In the map you should see the walls and the like filling in and looking consistent after 3 or 4 laps around a room. Then branch out into another area and do some laps there and then come back to your original area. Basically you are trying to see the same features over and over again as you make the map.
After you've driven in one direction around your house, then turn the TurtleBot around and drive in the counter direction to fill in the missing areas. Then finally your map should look pretty good and you can roam a little to fill in the middle area of a room away from the perimeter.
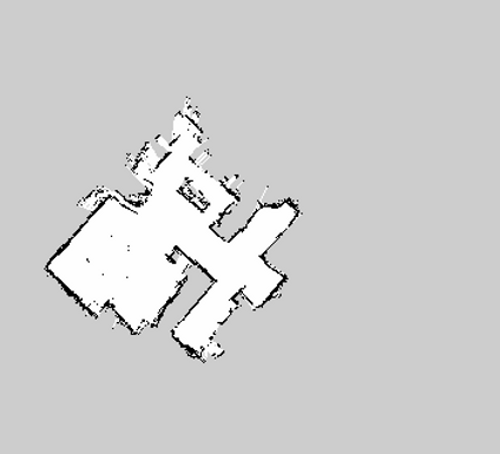
It may take several attempts to get it right but don't give up. Many people have made nice maps of their homes. Below is the map of my home and you can see other people's maps if you search on youtube. As you can see in my home I have a very large room that is about 20ft x 15ft and was able to make a decent map.



How to integrate VSALM map with semantic map, so robot be able to navigate in the envitroment and also know load seamntics in visualization convas ??!