Turtlebot tutorial - rviz "2D Pose Estimate" button
Hi,
I am able to complete all steps in the turtlebot tutorial, except the autonomous navigation part. I am stuck on where I am supposed to click on the "2D Pose Estimate" button in rviz and drag an arrow to set the initial location for the robot. I see the map that is loaded, and also the green laser scan dots, as well as the arrow that I drag to set the robots position and orientation. The only problem is that the location of the robot doesn't update after I release the drag.
Any suggestions? Thanks! David
=================
Update Additional questions (9/13)
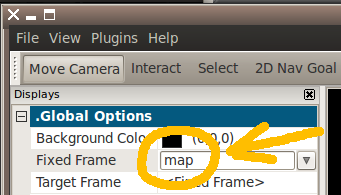
Thanks for your answer, Hersh. But the fixed frame option was already set to /map and I still can not get the robot to move. In case it helps, here's the output from the terminal that launched rviz. Thanks!
$ rosrun rviz rviz -d `rospack find turtlebot_navigation`/nav_rviz.vcg
[ INFO] [1315931847.897357347]: Loading general config from [/home/user/.rviz/config]
[ INFO] [1315931847.905051080]: Loading display config from [/home/user/.rviz/display_config]
[ WARN] [1315931876.219268690]: Message from [/amcl] has a non-fully-qualified frame_id [map]. Resolved locally to [/map]. This is will likely not work in multi-robot systems. This message will only print once.
[ INFO] [1315931976.304023293]: Setting pose: 0.360 -0.107 -0.427 [frame=/map]
[ INFO] [1315931996.143238028]: Setting pose: 0.322 -0.112 -0.390 [frame=/map]
[ INFO] [1315932004.627046894]: Setting goal: Frame:/map, Position(-0.084, 0.127, 0.000), Orientation(0.000, 0.000, 0.996, 0.086) = Angle: 2.970
[ INFO] [1315932008.714840910]: Setting goal: Frame:/map, Position(-0.203, 0.249, 0.000), Orientation(0.000, 0.000, 0.987, 0.159) = Angle: 2.822