
point cloud height problem
Hi,
We are using pr2_laser_snapshotter with laser_scan_assembler to get point cloud from our tilt laser. We noticed an offset in the z direction of the /base_link when the torso is not fully raised.
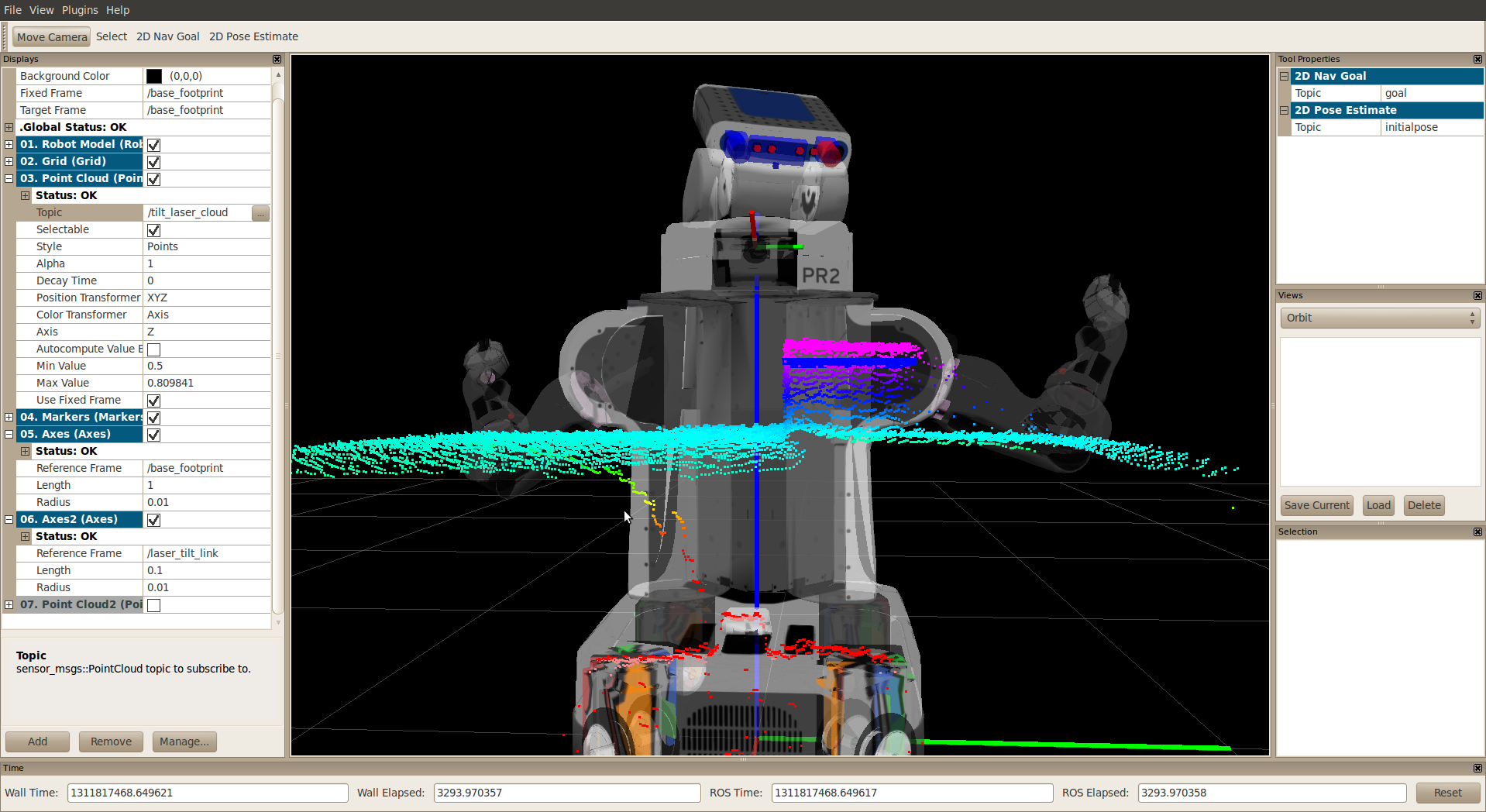
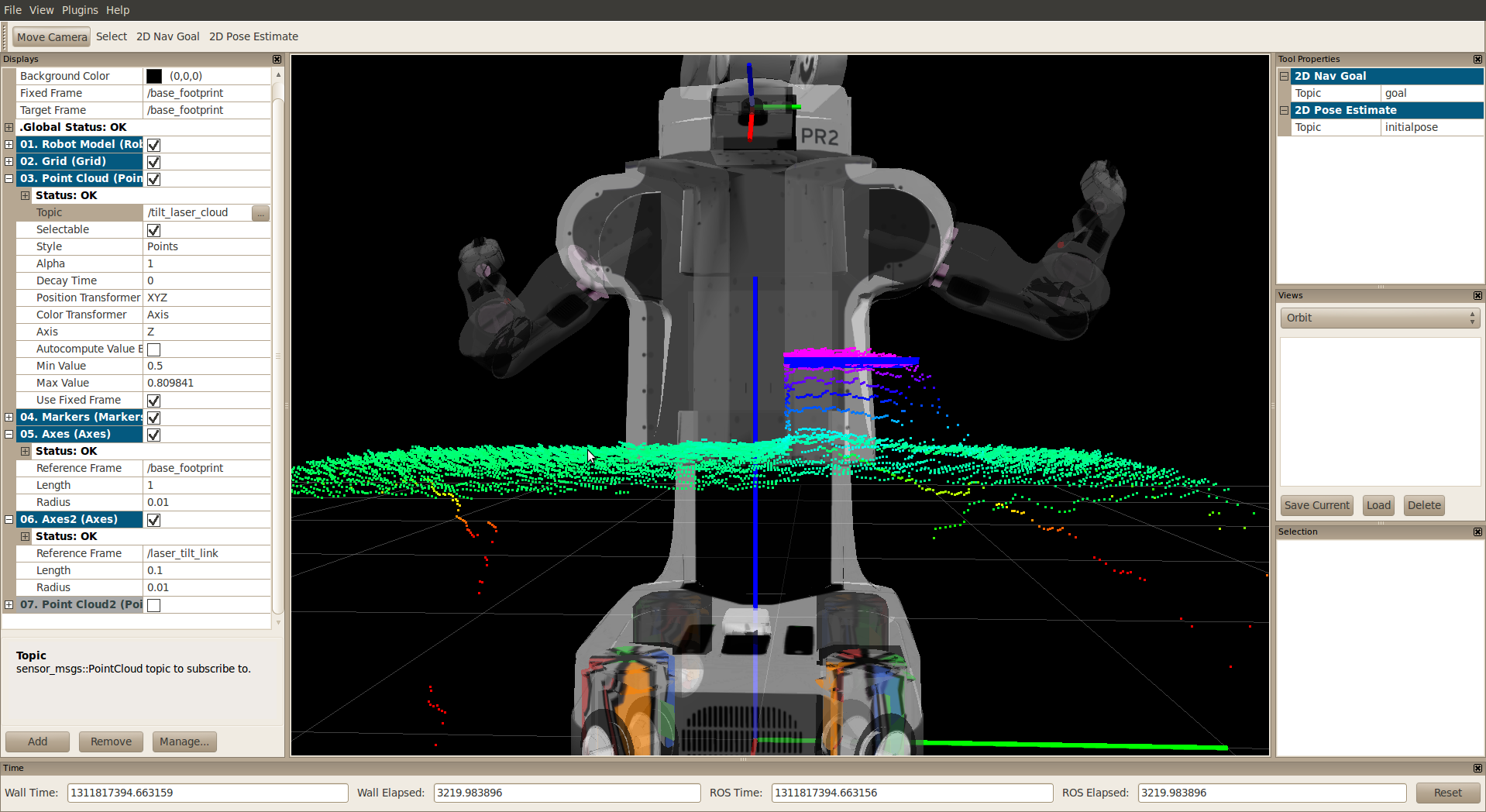
Unlike the point cloud in the picture above that is shifted up, the point cloud in the picture below is at the right height. The blue horizontal line is drawn in the /base_footprint frame as a reference.
Below is the launch file we used to get the point cloud:
<launch>
<node pkg="pr2_mechanism_controllers" type="send_periodic_cmd_srv.py"
name="laser_cmd"
args="laser_tilt_controller linear 10 1 .35" />
<node type="laser_scan_assembler" pkg="laser_assembler"
name="tilt_scan_assembler">
<remap from="scan" to="tilt_scan"/>
<param name="max_scans" type="int" value="400" />
<param name="fixed_frame" type="string" value="base_link" />
<param name="ignore_laser_skew" type="bool" value="true" />
</node>
<node pkg="pr2_laser_snapshotter" type="pr2_laser_snapshotter" output="screen\
"
name="snapshotter">
<remap from="laser_scanner_signal"
to="/laser_tilt_controller/laser_scanner_signal"/>
<remap from="full_cloud" to="tilt_laser_cloud" />
</node>
</launch>
Thanks for your help!
Huan
add a comment

