
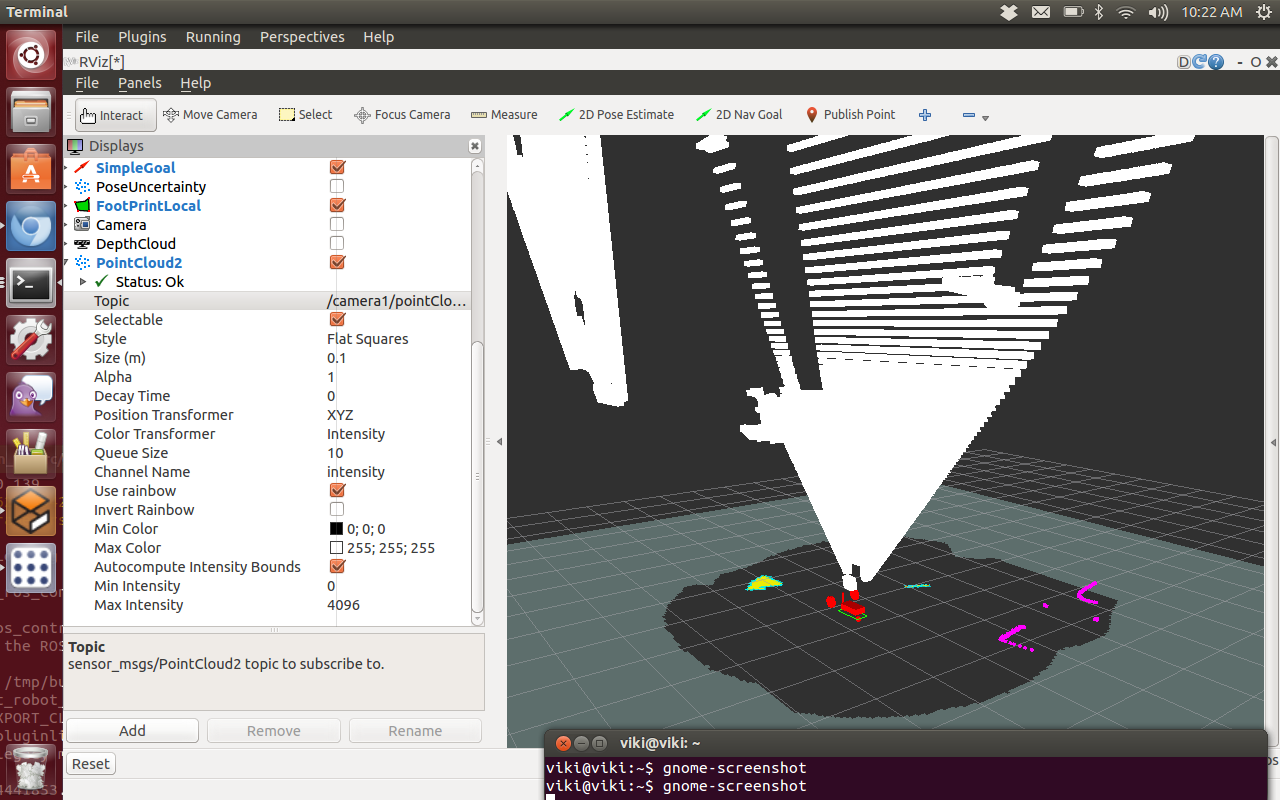
How to adjust orientation of camera
Why is the projection not on the XY plain?
<sensor name='camera1' type='depth'>
<visualize>1</visualize>
<pose>-0.1 0 0.2 0 0 0</pose>
<camera name='head'>
<horizontal_fov>1.39626</horizontal_fov>
<image>
<width>800</width>
<height>800</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<save enabled='0'>
<path>/tmp</path>
</save>
<depth_camera>
<output>depthImage</output>
</depth_camera>
<noise>
<type>gaussian</type>
<mean>0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name='plugin_1' filename='libgazebo_ros_depth_camera.so'>
<alwaysOn>true</alwaysOn>
<updateRate>30.0</updateRate>
<imageTopicName>image_raw</imageTopicName>
<pointCloudTopicName>pointCloud</pointCloudTopicName>
<depthImageTopicName>pointlCloudImage</depthImageTopicName>
<depthImageCameraInfoTopicName>camera1_info</depthImageCameraInfoTopicName>
<colorImageTopic>/camera/rgb/image_color</colorImageTopic>
<depthMapTopic>/camera/depth_registered/image_rect</depthMapTopic>
<cameraName>camera1</cameraName>
<frameName>camera_frame</frameName>
<pointCloudCutoff>0.001</pointCloudCutoff>
</plugin>
</sensor>
add a comment

