
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
This ANYbotics package seems to be useful, but it is a lot for a beginner. Maybe others can help there more.
I suggest you to take a look there to check how the coverage path planner is implemented directly:
gif + a screenshot
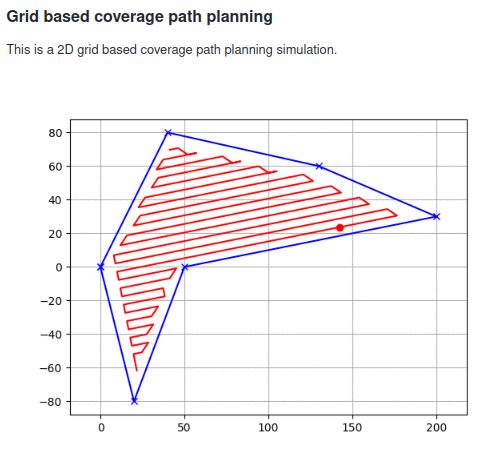
You can base some of your classes on this for sure, with modifying it to use the ROS OccupancyGrid.msg etc.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
