
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
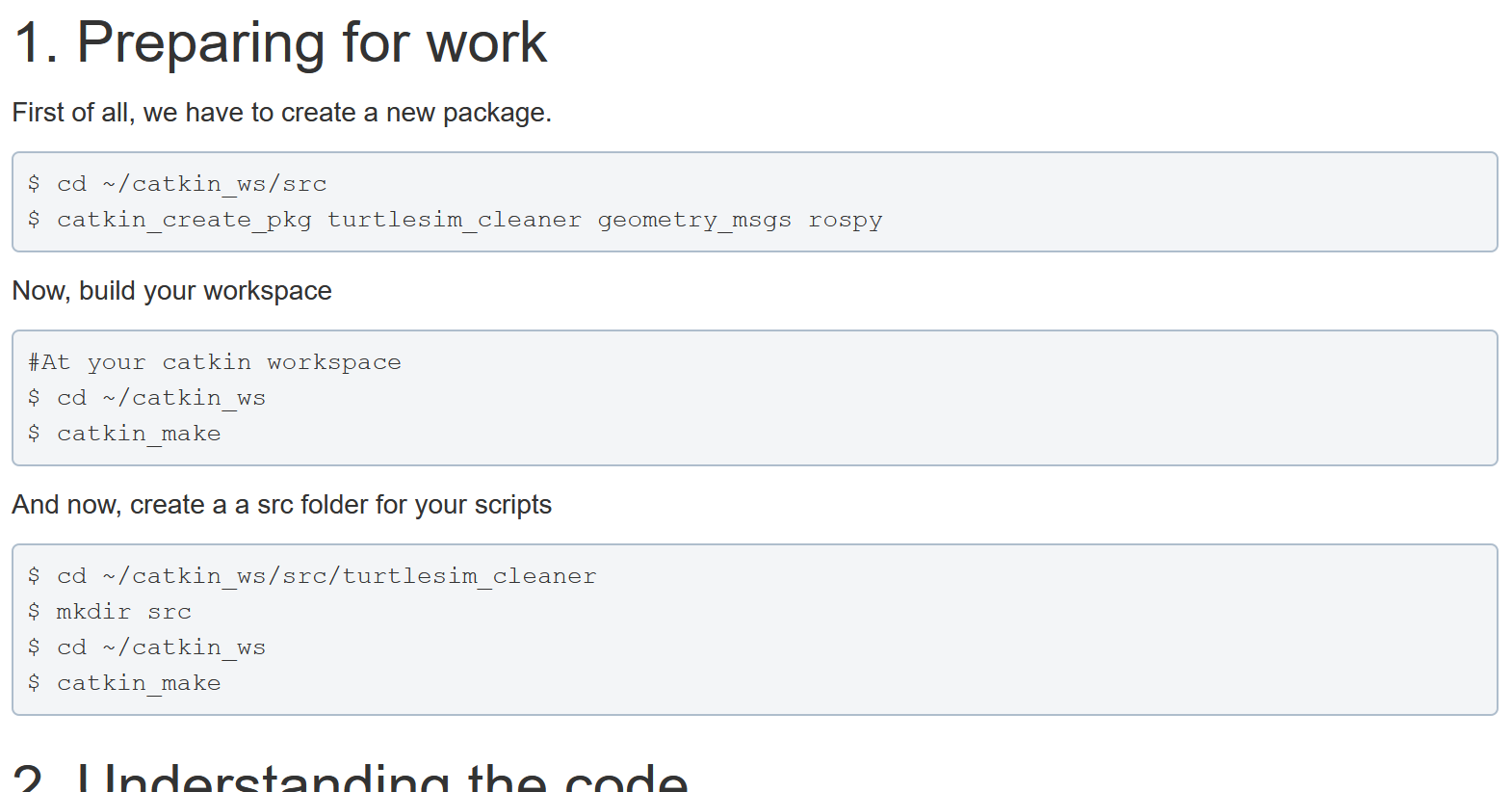
You end up creating the package rather than importing it. I have no trouble seeing the code snippets on the page you linked, here's a screenshot:
| | 2 | No.2 Revision |
You end up creating the package rather than importing it. I have no trouble seeing the code snippets on the page you linked, here's a screenshot:linked, so I've copy and pasted them below:
$ cd ~/catkin_ws/src
$ catkin_create_pkg turtlesim_cleaner geometry_msgs rospy
Now, build your workspace
#At your catkin workspace
$ cd ~/catkin_ws
$ catkin_make
And now, create a a src folder for your scripts
$ cd ~/catkin_ws/src/turtlesim_cleaner
$ mkdir src
$ cd ~/catkin_ws
$ catkin_make
Edit: transcribed the Wiki page rather than screenshot
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.