
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
How is it possible to dynamically reconfigure AMCL params with the dynamic_reconfigure package?
rqt_reconfigure succeeds former dynamic_reconfigure's GUI. Here is how to reconfigure AMCL using rqt_reconfigure's graphical user interface:
Start AMCL and pass the laser scans topic and robot base_frame_id as paramters. In my case it is:
$ rosrun amcl amcl scan:=/kobuki/laser/scan base_frame_id:=/base_footprint
Or create an amcl launch file and use that launch file to start the amcl node.
To launch reconfigure_gui run:
$ rosrun rqt_reconfigure rqt_reconfigure
You will see the screen as follows:
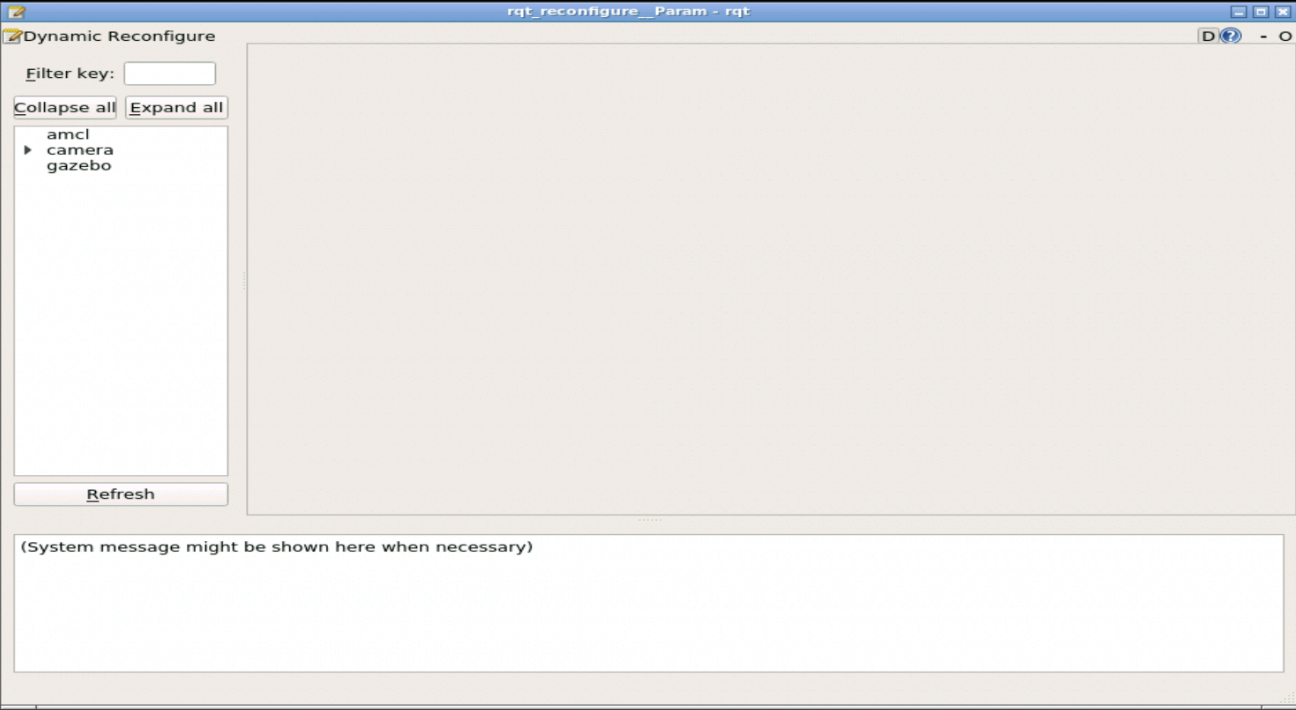
Click on amcl on the left side panel.
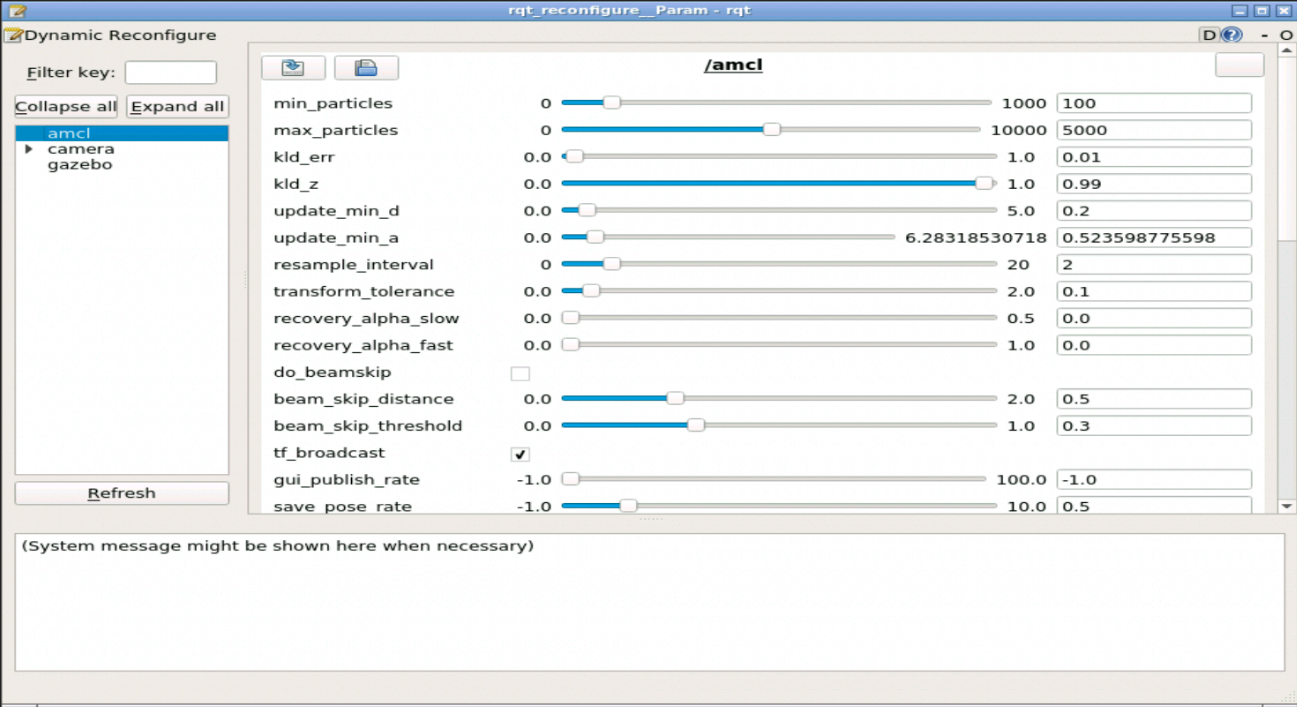
To modify the parameters on the fly, click and drag any of the sliders.
| | 2 | No.2 Revision |
How is it possible to dynamically reconfigure AMCL params with the dynamic_reconfigure package?
rqt_reconfigure succeeds former dynamic_reconfigure's GUI.
Here is how to reconfigure AMCL using rqt_reconfigure's graphical user interface:
Start AMCL and pass the laser scans topic and robot base_frame_id as paramters.
parameters.
In my case it is:
$ rosrun amcl amcl scan:=/kobuki/laser/scan base_frame_id:=/base_footprint
Or create an amcl launch file and use that launch file to start the amcl node.
To Then launch reconfigure_gui run:reconfigure_gui:
$ rosrun rqt_reconfigure rqt_reconfigure
You will see the screen as follows:
Click on amcl on the left side panel.
To modify the parameters on the fly, click and drag any of the sliders.
| | 3 | No.3 Revision |
How is it possible to dynamically reconfigure AMCL params with the dynamic_reconfigure package?
rqt_reconfigure succeeds former dynamic_reconfigure's GUI.
Here is how to reconfigure AMCL using rqt_reconfigure's graphical user interface:
Start AMCL and pass the laser scans topic and robot base_frame_id as parameters. In my case it is:
$ rosrun amcl amcl scan:=/kobuki/laser/scan base_frame_id:=/base_footprint
Or create an amcl launch file and use that launch file to start the amcl node.
Then launch reconfigure_gui:rqt_reconfigure:
$ rosrun rqt_reconfigure rqt_reconfigure
You will see the screen as follows:
Click on amcl on the left side panel.
To modify the parameters on the fly, click and drag any of the sliders.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.